Полная версия
Нейрореабилитация. Часть 1
Пассажиры первого класса «Титаника», который отбыл в первое и последнее плавание в апреле 1912 года, имели доступ в тренажерный зал. «Gymnasium» на корабле был оснащен гребными тренажерами, стационарными велосипедами, а так же аппаратами для имитирования езды на лошади и даже верблюде (рис. 5). Доступ в спортивный зал для женщин и мужчин был раздельным – с 9:00 до полудня и с 14:00 до 18:00 соответственно.
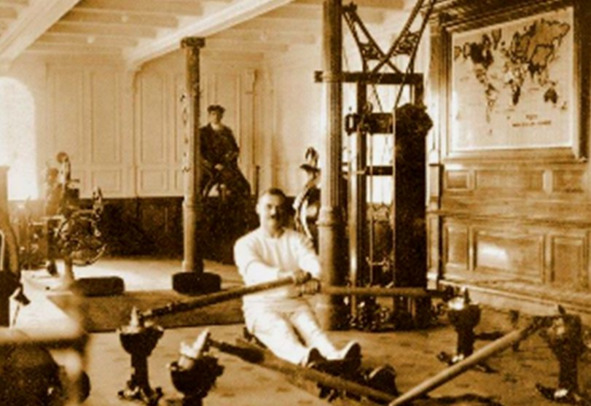
Рисунок 5. Тренажерный зал на «Титанике»
Одним из основоположников нейрореабилитации является выпускник Уппсальского университета Густав Цандер (рис. 6). Йонас Густав Вильгельм Цандер родился 29 марта 1835 года в Стокгольме. С 1855 по 1860 год он обучался в Уппсальском университете, и процесс получения медицинского образования начинал применять на практике медико-механическую гимнастику. По окончании обучения в университете Густав Цандер открыл в 1865 году в Стокгольме первый институт врачебной гимнастики.
В лечебной практике Густав Цандер применял разработанный им метод основанный на применении механических аппаратов спроектированных специально для тренировки мускулатуры различных частей тела. Во многом аппараты Густава Цандера являются прототипом современных силовых тренажеров.
Рисунок 6. Йонас Густав Вильгельм Цандер
При создании механотерапевтических систем Цандер полагался на основы учения П. Х. Линга, утверждавшего, что систематическая тренировка мышечного аппарата способна устранять многие явления заболеваний в человеческом теле. Метод Густава Цандера и его механотерапевтические аппараты были во многом революционны для того времени, они сочетали в себе не только возможность активно-пассивной гимнастики, но и возможности диагностической оценки (рис. 12). К примеру, сила сопротивления, преодолеваемого при упражнении, определялась при помощи специального счетчика, таким образом, производилась динамометрия различных групп мышц, что создавало возможность оценки мышечной силы в динамике, для контроля эффективности занятий на протяжении всего курса лечения.
Особого внимания заслуживают аппараты Густава Цандера для пассивной механотерапии. Они позволяли давать механическую нагрузку на различные группы мышц путем трясения, валяния, толчков, «проглаживания» и вибрационного движения особых приборов. Густав Цандер первым начал применять аппараты для вытяжения позвоночника, и коррекции позвоночника. Разработанные им системы позволяли не только проводить лечебно-модулирующие процедуры, но и математически точно изображать графически искривление позвоночника. Особое внимание Густав Цандер уделял значению кинезиотерапии в отношении детей и пожилых пациентов. В первом случае гимнастика имела ключевое значение в процессе формирования опорно-двигательного аппарата по мере роста организма и изменения антропометрических параметров тела, во втором случае позволяла укреплять и поддерживать организм, который в силу каких-либо хронических заболеваний или физических недостатков не был готов к обыкновенной гимнастике.
В Швеции физическая гимнастика по методу Цандера применялась не только в отношении пациентов с неврологической патологией, но и пациентов с заболеваниями опорно-двигательного аппарата и сердечно-сосудистой системы. В период работы с 1865 по 1898 год первый институт врачебной гимнастики в Стокгольме обслужил более двадцати тысяч пациентов (14332 мужчин и 5938 женщин), что в среднем составляет около 596 пациентов в год.
Со времени своего изобретения аппараты Густава Цандера активно применялись по всему миру. Механические аппараты Цандера быстро получили широкое распространение на курортах Европы и Америки. Цандеровская механотерапия была основным методом реабилитации в ортопедическом центре немецкого курорта Аахен, «Инвалидном доме им. Александра II» в Санкт-Петербурге, в Московском механо-гимнастическом институте на Петровке. «Считая полезным похудеть», гимнастикой на цандеровских машинах по рекомендации курортного врача занимался военный министр, профессор Николаевской академии Генерального штаба А. Ф. Редигер. «Была ли от нее какая-либо польза, я сказать не берусь – писал А. Ф. Редигер в своих мемуарах об отдыхе во Франценсбаде, – похудел я в это лето несколько более, чем обыкновенно в течение лета и бытность на водах».
В России в начале XX века были открыты Цандеровские институты в Петербурге, Москве, Киеве, Одессе, Евпатории, Харькове, Риге. В России первая лечебница, работавшая по методу Цандера и на его аппаратах, была устроена в Петербурге врачом С. Я. Эйнгорном в 1889 году. Затем они были открыты в Москве, Киеве, Одессе, Евпатории, Харькове, Ессентуках, Риге.
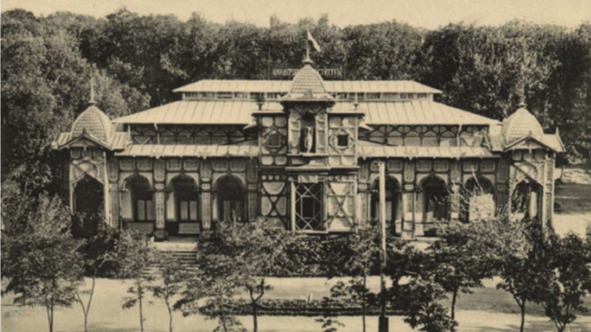
Рисунок 7. Институт Цандера в Ессентуках
В 1902 году Цандеровском институте механотерапии в Ессентуках был установлен комплекс из 64 аппаратов (рис. 7, 8). В начале XX века Ессентукский курорт работал как сезонный – с мая по сентябрь. По окончании сезона работников Цандеровского института увозили в Петербург, где у владельца, С. Я. Эйнгорна, был такой же институт.
С первого дня открытия института в качестве мальчика при аппаратах работал Евдоким Моисеевич Жерноклеев. В гражданскую войну аппараты были вывезены в Пятигорск. Возвращать их послали Жерноклеева, к тому моменту уже именовавшегося механиком-инструктором при институте. Как он деликатно сформулировал в воспоминаниях, «чтобы забрать аппараты, пришлось применить силу». Однако все кончилось благополучно: аппараты были установлены на свои привычные места, отрегулированы и в 1920 г. пациенты вновь заполнили аппаратный зал в Ессентуках.

Рисунок 8. Зал механотерапии в г. Ессеентуки
Во время Второй мировой войны у группы немецкой армии на Северном Кавказе был приказ вывезти уникальные аппараты в Германию. Когда немецкие войска вошли в Ессентуки, Жерноклеев разобрал аппараты и побросал все детали в кучу, щедро присыпав ее мусором. Если бы он погиб, то аппараты сгинули бы все и полностью: механик был единственным, кто мог собрать их обратно. Ненужная груда металлолома осталась лежать на месте, а после освобождения Ессентуков Жерноклеев привел все машины в образцовый порядок. Всего Густав Цандер создал около 70 различных тренажеров. Некоторые из них сохранены в музее курорта Хот-Спрингс, Арканзас; 36 выставлены в музее техники в Стокгольме.
Многие Институты механотерапии в Америке и Европе после первой мировой войны и после смерти их создателя (в 1920) были закрыты. В настоящее время единственными лечебными учреждениями, где применяются аппараты Цандера являются отделение Механотерапии в г. Ессентуки и кабинет «Механотерапии» одесского клинического санатория «Лермонтовский».
В лечебном учреждении в г. Ессентуки продолжает использоваться более 50 аппаратов, в Одессе – 20 различных аппаратов. Кроме того, в первой половине XX века инженером-техником Е. М. Жерноклеевым по аналогии с аппаратами Цандера были разработаны тренажёры собственной конструкции, которые также используются в Ессентуках.
Многие идеи предложенные Густавом Цандером при разработке и конструировании своих механотерапевтических аппаратов находят свое продолжение в современных высокотехнологичных образцах реабилитационного оборудования. Например, принесший в свое время широкую известность Густаву Цандеру аппарат «Лошадка» (рис. 10), воспроизводивший паттерны движений седока находящегося в седле лошади и по сути представляющий собой аппарат для иппотерапии в настоящее время стал неким прототипом для современного оборудования, в том числе роботизированного. К примеру, современный роботизированный комплекс «Hirob» представляет собой не имеющий аналогов реабилитационный робот, созданный на основе трехмерного анализа движений лошади (рис. 9). «Hirob» обладает встроенными паттернами движений наездника, в точности повторяет движения лошади и позволяет проводить автоматизированную нейрореабилитацию на основе иппотерапии.
Еще одним аппаратом сконструированным Густавом Цандером является аппарат с нестабильной опорой для работы с пациентами с патологией пояснично-крестцового отдела позвоночника. Современные реабилитационные аппараты с успехом воплощают идею, предложенную в свое время Цандером (рис. 11).
Активное внедрение в клиническую практику оздоровительных технологий, гимнастики и реабилитации, послужило определенным толчком к разработке все новых и новых идей по всему миру, которые со временем стали классикой реабилитологии. Так, например, шведская стенка появилась ближе к середине XIX века благодаря исследованиям шведского терапевта Пера Хенрика Линга в Центральном гимнастическом институте Стокгольма.

Рисунок 9. Роботизированный комплекс для иппотерапии «Hirob»
В 1792 году Пер Хенрик закончил гимназию в Векшё. С 1793 года изучал богословие в университете Лунда. Получил учёную степень в 1797 году в университете в Уппсале. Затем уехал за границу на несколько лет, сначала в Копенгаген, где он преподавал современные языки, а затем в Германию, Францию и Англию. Материальные трудности во время путешествия подорвали его здоровье, он страдал от ревматизма, но приобрёл значительное знание гимнастики и фехтования. В 1804 году он вернулся в Швецию и зарекомендовал себя как преподаватель данных дисциплин в Лунде, был назначен в 1805 году преподавателем фехтования в университете. Он обнаружил, что его ежедневные упражнения полностью восстановили его телесное здоровье, поэтому он стал думать над тем, как применить данный опыт на благо других. Он присутствовал на занятиях по анатомии и физиологии и прошёл всю учебную программу для подготовки врача, затем разработал собственную систему гимнастики, разделённую на четыре ветви: педагогическую, медицинскую, военную и эстетическую.
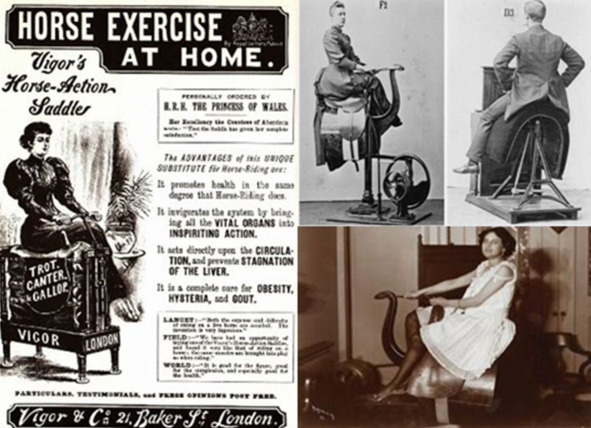
Рисунок 10. Аппарат Г. Цандера «Лошадка»
После нескольких попыток заинтересовать правительство Швеции Линг, наконец, в 1813 году вступил с ним в сотрудничество, и Королевский Центральный институт гимнастики, предназначенный для подготовки преподавателей по данной дисциплине, был открыт в Стокгольме; его принципалом стал сам Линг.
Многие врачи относились к деятельности Линга его учеников с большим скепсисом, однако тот факт, что в 1831 году Линг был избран членом Шведского медицинского общества, показывает, что, по крайней мере, в его родной стране его методы были признаны профессиональными. Последователями его учения стали Ларс Габриэл Брантинг (1799—1881), сменивший Линга на посту директора института, Карл Август Георгий, который стал субдиректором института, его сын, Яльмар Линг (1820—1886). Вместе с майором Туре Брандтом, который с 1861 года специализировался на лечении женщин (гинекологическая гимнастика), они считаются пионерами шведской лечебной гимнастики.
Еще один классический атрибут современных залов лечебной физкультуры и фитнесс-клубов – беговая дорожка, родилась в 1952 году в Вашингтонском университете. Доктора Роберт Брюс и Уэйн Квинтон поначалу использовали этот аппарат для диагностики сердечных заболеваний. Но очень скоро выяснилось, что он еще и прекрасно тренирует сердечно-сосудистую систему.
Степпер, впервые появился на выставке Национальной Ассоциации спортивных товаров в Оклахоме в 1983 году – его представили Лэнни Поттс и ее партнер Джим Уокер. Тренажер представлял собой лестницу, вращающуюся с заданной скоростью. Эллиптический тренажер в 1995 году изобрел американский инженер Дэрил Прекор. Дочь Дэрила Прекора получила травму пятки, и ей была необходима особая реабилитация, предполагавшая имитацию нормального движения стопы, но без нагрузки на суставы, идеальную траекторию движения создавал именно эллиптический тренажер.
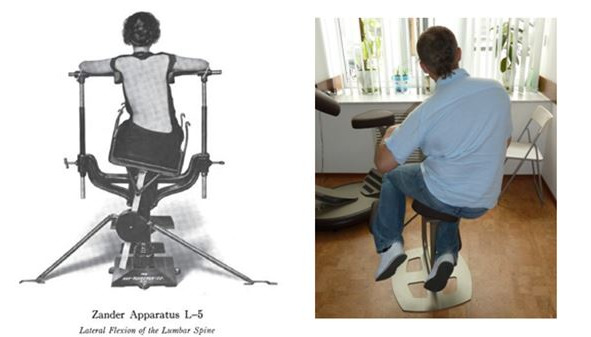
Рисунок 11. Слева аппарат Г. Цандера, справа современный
реабилитационный тренажер «Mobidos»
Виброплатформы, как реабилитационный тренажер пришел в спортивно-оздоровительную индустрию из космонавтики – в 70-х годах вибротренинг стал активно использоваться для восстановления и реабилитации космонавтов после полетов. Тренажер способен единовременно активизировать все 100% мышечной массы организма. Вертикальные звуковые вибрации заставляют мышцы рефлекторно очень быстро сокращаться и расслабляться. Всего 10 минут занятия на виброплатформе способны заменить полноценную тренировку.
Первым производителем современных силовых тренажеров считается американец Артур Джонс (Arthur Jones), основатель компании «Nautilus». В начале 1970-х годов он представил машину «Blue Monster», позволявшую выполнять на ней базовые упражнения бодибилдинга. Именно тренажеры компании «Nautilus» (рис. 13) помогли силовым упражнениям стать частью популярной культуры. В своих интервью Артур Джонс упоминает, что узнал о машинах Густава Цандера лишь спустя много лет после того, как придумал свои тренажеры. По словам Джонса, при проектировании тренажеров он ставил главной задачей упрощение и оптимизацию силовых тренировок.
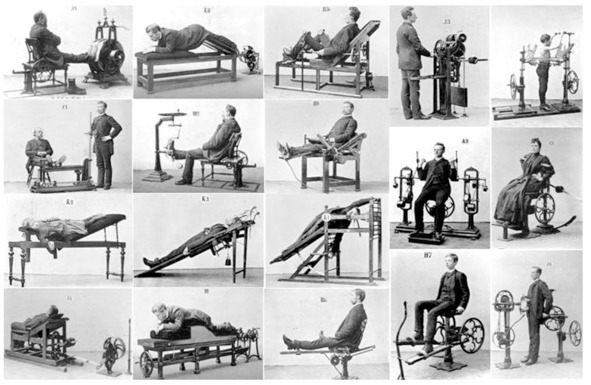
Рисунок 12. Механотерапевтические аппараты Густава Цандера
Представленная компанией «Nautilus» система блоков действительно позволяла держать мышцу в напряжении на протяжении всей амплитуды движения, что было революционным. Кроме этого, компания изобрела тренажер для упражнения «пуловер», расширяющий грудную клетку.
Джозеф Эдвин Уайдер является человеком, адаптировавшим тренажеры для домашнего использования. Основанная им компания «Weider» широко рекламировала подобные машины через собственные журналы о фитнесе и бодибилдинге.
Возвращаясь к вопросу о терминологии следует пояснить, что официально понятие «реабилитация» было впервые введено в 1903 г. Францем Иозефом Раттер фон Бусом в книге «Система общего попечительства над бедными», подразумевая при этом исключительно благотворительную деятельность. В отношении лиц с физическим и функциональным дефектом термин «реабилитация» начал активно употребляться с 1918 г., в свете открытия в Нью-Йорке Института Красного Креста для инвалидов. Дальнейшее развитие медицинской реабилитации и ее становление, как самостоятельной науки происходило после Второй мировой войны в связи с появлением большого числа инвалидов среди лиц, пострадавших в военных действиях. Всемирная организация здравоохранения (ВОЗ) дает следующее определение понятию медицинской реабилитации (МР): это комбинированное и координированное применение социальных, медицинских, педагогических и профессиональных мероприятий с целью подготовки и переподготовки индивидуума для достижения оптимальной его трудоспособности.
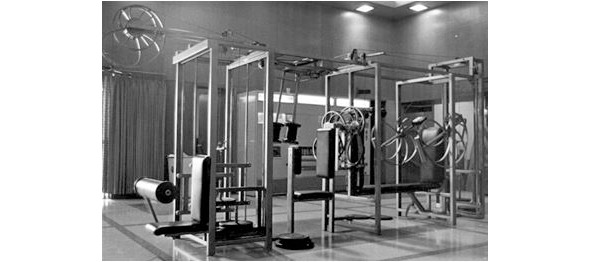
Рисунок 13. Тренажеры «Nautilus»
На сегодняшний день история развития физической культуры, восстановительной медицины, реабилитационных технологий, велнес-концепции – это, прежде всего целый пласт знаний, широкий арсенал методов и учений, который актуален, применим в практической клинической деятельности и высокоэффективен при работе с пациентами практически любой нозологической группы. Выбор программы реабилитационных или профилактических оздоровительных технологий вопрос персонифицированного и междисциплинарного подхода, используемых на практике в настоящее время.
Новейшая история нейрореабилитологии, как самостоятельной дисциплины построена на внедрении в клиническую деятельность инновационных высокотехнологичных реабилитационных технологий, таких как:
1.Компьютерные технологии с реализацией принципов биологической обратной связи (БОС) и виртуальной реальности;
2. Роботизированные технологии;
3. Мозг-машинные интерфейсы;
4. Технологии бионического протезирования;
5. Технологии 3D печати;
В 1996 г. в г. Ньюкасле (Великобритания) состоялся первый Всемирный конгресс по неврологической реабилитации. В настоящее время эти конгрессы проводятся регулярно каждые три года и позволяют осветить основные вопросы дальнейшего развития системы нейрореабилитации. Одной из важных вех в развитии нейрореабилитационных технологий стало изобретение роботизированных аппаратов. Развитие данного направления связано с именем швейцарского инженера-электронщика и кинезиолога Джери Коломбо (Gery Colombo).
Идея роботизированного комплекса, позволяющего восстанавливать функцию движения у пациентов с повреждениями центральной нервной системы и, как следствие, глубоким неврологическим дефицитом, была реализована Джери Коломбо в роботизированном аппарате «Lokomat» (рис. 14). В настоящее время такие роботизированные системы используют для детей с детским церебральным параличем (ДЦП), пациентов с последствиями острого нарушения мозгового кровообращения (ОНМК), спинального инсульта и иными неврологическими патологиями, при которых присутствует паралич нижних конечностей. Джери Коломбо решил оптимизировать и ускорить восстановительный процесс больных с параличом при помощи специализированного манипулятора, подстраиваемого персонально под больного, управляемого компьютером. Такая идея никому не понравилась. Инженеру с трудом удалось найти денежные средства на исследования. Однако в 1996 г. была основана компания «Hocoma». А в 2001 г. был выпущен первый «Lokomat». В 2005 г. – первый робот для осуществления детской реабилитации. Робот состоит из беговой дорожки, системы роботизированных ортезов, подвесного механизма, предназначенного для снижения массы больного до требуемых значений. При весе в сто килограммов, больной может передвигаться, как будто он весит, к примеру, двадцать килограммов. Благодаря этому можно существенным образом снизить утомляемость и формировать правильный двигательный стереотип. Ортезы, на которых присутствуют двигатели, надевают на нижние конечности, при этом тазобедренные, коленные суставы сохраняют возможность производить движения в пределах физиологических двигательных актов. Углы сгибания-разгибания, скорость передвижения, мощность функционирования поддаются регулировке. В системе присутствуют четыре двигателя. Их возможно независимо друг от друга настраивать (углы сгибания, мощность). Из-за возможности регулировать сгибание-разгибание систему могут использовать больные, имеющие мышечные либо ортопедические контрактуры. Благодаря снижению мощности двигателя увеличивается двигательная нагрузка. Датчики считывают расположение конечностей. Данные поступают к центральному процессору, который управляет ходьбой, анализирует поступающую информацию. После обработки информация выводится на экран монитора (представляются специализированные индикаторы либо графики ходьбы). Занимающийся может сам произвести оценку своей активности, выполнить корректировку, если требуется – на этом построен принцип БОС.
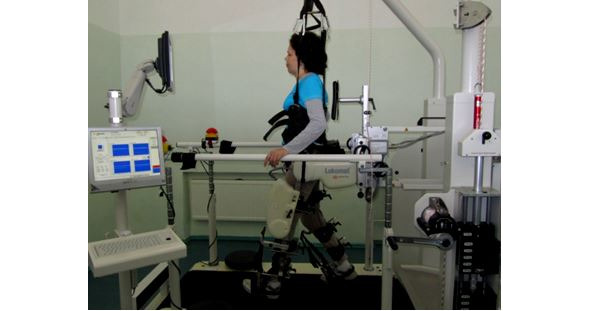
Рисунок 14. Роботизированный комплекс «Lokomat»
Благодаря занятиям на роботизированной системе увеличивается сила, мышечная выносливость на нижних конечностях, тренируется кардио-респираторная система, разрабатывается контрактура, восстанавливается чувствительность на ногах, улучшается кровообращение и лимфообращение. Целью задействования системы является улучшение двигательной способности больных, имеющих неврологические патологии, нарушения движений, с использованием концепции нейропластичности. В занятиях на «Lokomat» скомбинированы функциональное локомоторное лечение и мотивация, выполнение оценки состояния больного, для чего используются обратная связь, виртуальная реальность. В экспериментальных работах Remple M.S. с соавтр. (2001), Luke L.M., Allred R.P., Jones T.A. (2004) выявлено, что после 400 повторений движений, отмечаются изменения в synapse density в первичной двигательной коре. В тоже время в исследованиях C.E. Lang et al. (2007), показано, что в течение 35-минутного традиционного занятия ЛФК больной в среднем совершает 39 активных, 34 пассивных и 12 целенаправленных движений конечности, которые, однако, не будут абсолютно одинаковы, одноамплитудны, симметричны и в своем функциональном плане максимально приближены к физиологическим. Это создает сложности в эффективности реабилитации пациентов с тяжелым и грубым неврологическим дефицитом, так как такая тренировка оказывается недостаточным стимулом для активизации процессов нейропластичности. Нейропластичность – это совокупность различных процессов ремоделирования синаптических связей, направленных на оптимизацию функционирования нейрональных сетей, и играющая решающую роль в процессах филогенеза и онтогенеза (при установлении новых синаптических связей, возникающих при обучении, а также при поддержании функционирования уже сформированных нейрональных сетей – первичная (естественная) нейропластичность, а также после повреждения структур нервной системы, в ходе восстановления утраченных функций – посттравматическая нейропластичность. В многочисленных экспериментальных и клинических исследованиях показано, что в активизации механизмов нейропластичности ЦНС важную роль играют различные методы медицинской реабилитации. Как видно из данных исследований роботизированная техника создает возможность выполнения гораздо большего количества физиологических эргономичных движений нежили классическая активно-пассивная гимнастика. Более массивное активизирующее воздействие на процессы нейропластичности, в том числе осуществляемое через механизм БОС и стимуляцию сенсорных систем, главный тезис патогенетического обоснования эффективности роботизированных реабилитационных комплексов.
Сегодня направление роботизированных технологий в реабилитации и хирургии превратилось в интенсивно развивающуюся отрасль. Новое поколение роботизированных систем представляет собой уже не только статичные стационарные комплексы, но и динамические мобильные аппараты с возможностью максимально динамичной тренировки в сочетании с электронейромиографической-стимуляцией. Такой системой является к примеру аппарат «Walk trainer» (рис.15).

Рисунок 15. Роботизированный комплекс «Walk trainer»
Еще одним инновационным направлением современной нейрореабилитологии является бионическое протезирование. Бионическое протезирование становится процветающей областью науки, являясь примером современнейших высокотехнологичных реабилитационных технологий, связанных с разработкой устройств имитирующих работу «живых органов» – конечностей, слухового, зрительного и иных анализаторов. Проблема протезирования стала особенно острой после драматических событий Первой и Второй Мировой войн, когда большое количество ампутантов, пострадавших в боевых действиях нуждалось в помощи специалистов по протезированию и реабилитации. В наше время данная проблема не теряет своей актуальности. Одним из достижений последних лет в области бионического протезирования можно считать разработку протеза для верхней конечности – кисть «Michelangelo» (рис.16). Искусственная конечность состоит из твердых и мягких элементов, которые играют роль костей, суставов, соединительной ткани и сухожилий. Возможности данного протеза позволяют научиться регулировать скорость движения пальцев и силу сжатия. «Michelangelo» – это миоэлектрический протез, так как управление происходит с помощью импульсов, которые генерируют мышцы пользователя и передаются двумя подкожными электродами. Каждый палец оборудован собственными двигательными осями. Рука имеет 3 автоматических режима и 7 функций, рассчитанных на различные действия. Запястье протеза – это уникальная разработка, которая называется «Axonwrist» и является очень гибким и многофункциональным. В частности, можно согнуть руку, повернуть ее вверх или вниз. В начале запястье имеет овальный элемент, похожий на настоящий человеческий сустав. В него встроили блок управления с емкой батареей, которой хватает на целый день работы. Размеры руки позволяют ее подбирать индивидуального для каждого пациента.
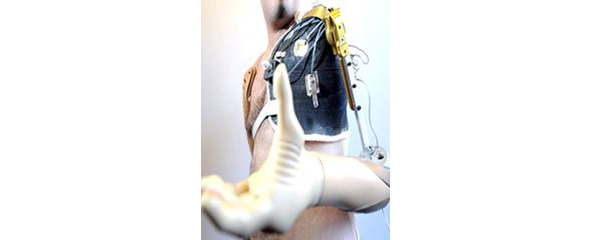
Рисунок 16. Протез для верхней конечности «Michelangelo»
Современные реабилитационные технологии в настоящее время активно внедряются, как в клиническую практику, так и в спортивную деятельность, что особенно востребовано в паралимпийском движении. Активное внедрение в спорте высших достижений современных и инновационных реабилитационных технологий способствует скорейшему восстановлению после травм, использованию на практике уникальных возможностей и скрытых резервов нашего организма. Спорт превращается в соревнование реабилитационных технологий.