Полная версия
Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная
Если имеет место случай неполного воздействия, то есть не все параметры страты воздействия взаимодействуют с параметрами-рецепторами объекта, то это равносильно снижению величины воздействия и изменению вектора цели. И хотя в этом случае система прореагирует медленнее, чем в случае полноценного контакта, но это не из-за повышения инерционности объекта, а из-за изменения величины воздействия.
Более сложные объекты, которые снабжены интегрированной некогнитивной системой управления, не теряя естественной инерционности по параметрам, приобретают дополнительную инерционность, обусловленную такими факторами как:
– естественная инерционность параметров системы управления;
– функциональная инерционность системы управления, заключающаяся в том, что системе управления, в задачи которой входит удержание значений регулируемых параметров в определенных пределах, требуется время на отслеживание текущего значения параметра, выработке решения о его соответствии требованиям, в случае несоответствия требуется дополнительное время для выработки управляющего решения и организации и производства управляющего действия.
Еще более сложные объекты снабжены когнитивной управляющей системой. В этом случае объект, именуемый уже субъектом, является участником процесса фиксации целей для самого себя. По мнению автора (мнение отражено в Эссе «Общественные системы. Элементы генезиса»), целью субъекта является некий промежуточный результат между требованиями окружающего мира и устремлениями самого субъекта. Поэтому к задержкам, присущим объектам с системой управления, добавляются когнитивные задержки, связанные с:
– обработкой информации не только о текущем состоянии личных параметров субъекта, но и о его положении в системе взаимоотношений;
– производством оценки качества последующего состояния субъекта при реализации исключительно требований окружающего мира;
– производством оценки качества последующего состояния субъекта при реализации исключительно собственных устремлений;
– выработкой результирующего целевого состояния, учитывающего требования окружающего мира и собственных устремлений;
– выработкой алгоритма достижения цели и его конкретизация в управляющие команды;
– доведение управляющих команд до исполнительных органов;
– инерционность исполнительных органов в реализации управляющих команд не добавляет новых нюансов по сравнению с простыми системами с интегрированными системами управления.
В дальнейшем, при рассмотрении движения объектов в пространстве состояний будет пониматься обобщенная величина меры инерции И0, учитывающая в каждом конкретном случае, в соответствии со статьей 5, возможные влияния тех или иных особенностей объектов или способов определения инерционности.
1.7.2. Оценка движения объектов в пространстве состояний.
После того, как (объект) субъект тем или иным способом обретет цель, он начинает двигаться к ней. Следует отметить, что появление цели у объекта может быть, как принципиальным фактором, так и результатом совокупности случайных событий.
Обретение цели субъектом является сложным и, в определенной степени, неоднозначным процессом:
– абсолютно пассивные объекты, лишенные собственной системы управления, приобретают целевую функцию как результат суперпозиции внешних воздействий;
– объекты, снабженные простой системой управления (без когнитивных функций) способны противодействовать внешним воздействиям с тем, чтобы препятствовать недопустимому изменению контролируемых параметров. Слишком сильное внешнее воздействие может преодолеть противодействие системы управления с угрозой разрушения объекта по указанным параметрам;
– объекты, снабженные когнитивными системами, являются участниками (т.е. субъектами) взаимоотношений. Система управления таких объектов решает проблемы не только удержания параметров системы в контролируемых пределах, но и вопросы фиксации параметров субъекта как единого целого в пространстве состояний, образуемом системой взаимоотношений данного субъекта и окружающего мира. Это означает, что назначение цели субъекту является результатом некоторого компромисса между целями, предлагаемыми окружающим миром, и целями, которые самостоятельно назначает себе субъект.
Для характеристики движения обычно используются такие показатели как расстояние до цели, скорость перемещения к цели, прогнозируемое время достижения цели, средняя скорость движения в обобществленном пространстве состояний, точность достижения цели.
Дополнительно, если позволяет нелинейность выражений для скоростных показателей, могут применяться такие показатели как ускорение (первая производная), тенденция (вторая производная или ускорение ускорения).
Также производится оценка инерционных свойств объекта.
1.7.2.1. Расстояние.
При оценке показателей расстояния следует учитывать следующее:
A) общее расстояние до цели. Субъекту в пространстве состояний для достижения цели не всегда пригодно прямое направление от точки старта до точки финиша. Как правило, субъект вырабатывает некоторый алгоритм достижения цели, состоящий из ряда прямолинейных этапов, при этом концы отрезков именуются задачами или узловыми точками. Если таких этапов несколько (D), длина каждого этапа составляет величину Ld, то общее расстояние до цели может быть определено выражением (27) как сумма этапов:

выражение 27
B) следует отметить, что полноценный учет пройденного расстояния субъектом в пространстве состояний важен с точки зрения поведения ресурсозависимых параметров, так как, если в качестве пройденного расстояния принять расстояние между стартом и целью, определяемое длиной прямой, проложенной между ними, то будет неверной оценка конечного состояния ресурсозависимых параметров, да и состояние самих ресурсных параметров будет не совпадать с прогнозируемыми значениями;
C) если учесть, что каждый этап в пределах пространства состояний может быть выражен интервалом значений того или иного параметра (см. 14/1), то общее расстояние от старта до цели может быть выражено через интервалы значений параметров пространства состояний (если допустить, что количество параметров составляет К) выражением (28):
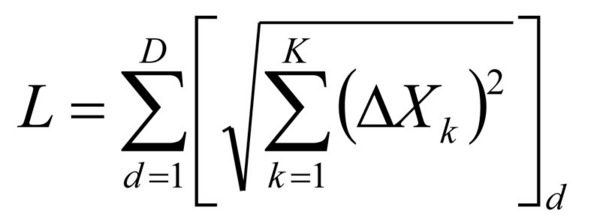
выражение 28
D) расстояние, пройденное субъектом от начала старта до настоящего момента L (t) с учетом алгоритма движения, характеризует текущую позицию субъекта в пространстве состояний. При этом каждый промежуточный этап до текущего состояния субъектом может быть пройден за свое время. Текущее значение пройденного расстояния может быть определено с помощью выражения (29):
выражение 29
где под символом (см. 15/1) понимается отрезок времени, прошедший от начала выполнения текущего этапа под номером (М+1) до момента фиксации текущего значения пройденного расстояния, при том условии, что к моменту старта текущего этапа пройдено М этапов, а под символом (см. 16/1) понимается пройденный отрезок текущего этапа;
E) остаточное расстояние L (t) -, это расстояние, определяемое между текущей позицией субъекта и точкой финиша с учетом алгоритма движения, что может быть определено выражением (30):
выражение 30
F) величина смещения от трассы. Этот показатель рассматривается в статье 3 в виде ошибки состояния. Этот показатель важен с той точки зрения, что перед объектом, в случае ухода с трассы, возникает необходимость либо вернуться на трассу из текущей точки, либо проложить измененную трассу. Все это в совокупности может привести к появлению непрогнозируемых задержек на трассе, либо к изменению условий движения объекта в пространстве состояний. Все эти факторы, в свою очередь, могут негативно сказаться на эффективности объекта.
1.7.2.2. Время.
В качестве временных (ударение на последний слог) показателей в дальнейшем будут использоваться:
– прогнозируемое время операции T0. Для достижения цели (решения задачи) субъекту отводится некоторое время (иногда время решения задачи может совпадать с периодом жизнедеятельности объекта) либо собственной системой управления, либо вышестоящей системой управления (либо в результате их взаимодействия). Исходя из того, что общая дистанция подразделяется на несколько этапов, общее прогнозируемое время также может разбиваться на части, именуемые прогнозируемое время преодоления этапа Tod;
– действительное время достижения цели Тц – это время, которое субъект действительно затрачивает (или затратил) на преодоление дистанции L (оценивается после решения поставленной задачи);
– текущее время Т – время, прошедшее от начала старта по настоящий момент. Одновременно текущее время определяет остаток времени из отпущенного на проведение операции (прохождение этапа);
– прогнозируемое время достижения цели из текущей точки Тп, которое определяется как время, необходимое для преодоления остатка пути до цели, если бы субъект продолжал двигаться с текущей скоростью;
– разница между фактическим и прогнозируемым временем, обозначенная в соответствии со строкой 17 таблицы 1 (см. 17/1) достижения цели из текущей точки характеризует отклонение объекта от графика движения, вызванное различными причинами (инерция, эксцессы во время движения), поэтому время отклонение от графика движения имеет интегральный характер;
– период жизнедеятельности Тж для объектов, имеющих ограниченный срок существования, заканчивающийся разрушением или смертью, т.е. для одноразовых объектов, что верно и для биологических, объектов;
– период активности Та. Этот временной промежуток имеет смысл, если на решение задачи объект (субъект) тратит не все прогнозируемое время операции, а только его часть.
1.7.2.3. Скорость.
В качестве скоростных параметров будут применяться следующие:
– прогнозируемая скорость движения к цели V0. Прогнозируемая скорость определяется как отношение длины дистанции L к прогнозируемому (планируемому) времени достижения цели (31):
выражение 31
– ввиду того, что трасса может быть разбита на несколько участков, движение на каждом из которых (индекс участка обозначен буквой d) может осуществляться по своему графику, то можно ввести показатель прогнозируемой скорости движения по этапу Vod (32):
выражение 32
– средняя скорость достижения цели Vц – определяется отношением длины пути L к затраченному на преодоление этого пути времени Тц в виде выражения (33):
выражение 33
– аналогично прогнозируемой скорости можно определить среднюю скорость движения по этапу (34). Значение этого показателя фиксируется постфактум – по достижении цели (или по достижении конца этапа). Разница между фактической и прогнозируемой скоростью может являться показателем эффективности (на равных правах с временным (ударение на последнем слоге) показателем) решения объектом поставленной задачи:
выражение 34
– текущая скорость V (t) определяется отношением дистанции, пройденной к настоящему моменту времени, к временному (ударение на предпоследний слог) интервалу Т, затраченному на прохождение этого участка и может быть выражено соотношением (35):
выражение 35
— эффективная скорость Vзфф определяется как скорость, с которой должен двигаться объект, чтобы за оставшееся время достичь цели. Аналитическое выражение будет определено ниже по тексту.
В этом же разделе следует определить прогнозируемое время достижения цели, которое определяется как время, необходимое для преодоления остатка пути до цели, если бы субъект продолжал двигаться с текущей скоростью, что может быть представлено выражением (36):
выражение 36
Сравнение прогнозируемого времени достижения цели и остаточного времени из отведенного на операцию (прохождение этапа) позволяет системе управления принимать квалифицированное решение об изменении графика движения.
1.7.3. Движение объектов и систем с учетом инерционности.
Представляется очевидным, что инерционность объектов, какого бы происхождения они не были, оказывает определенное влияние на характер движения, на прогнозируемость достижения результатов.
Прежде, чем приступить к разработке аналитических конструкций, следует, по мнению автора, рассмотреть движение инерционного объекта качественно.
При движении любого объекта (в том числе и субъекта, и сложных технических и общественных систем) в пространстве состояний, как указывалось, проявляются инерционные свойства, заключающиеся в том, что объект при воздействии (фиксации целевого состояния) любой этиологии (целевом или стохастическом) на него, как стороннем, так и со стороны собственной системы управления, не сразу изменяет вектор и величину скорости движения.
Это может приводить к следующим явлениям:
– если объект находился в покое, то начало движения оказывается отложенным, а достижение уровня скорости, требуемого для достижения цели (или промежуточной задачи) в заданное время происходит не скачкообразно, но постепенно. Постепенное наращивание скорости, в противовес скачкообразному, приводит к потере времени и возможному выходу из графика движения к цели;
– если же объект находился в движении, то после изменения как по модулю, так и по направлению управляющего (как стороннего, так и внутреннего, как стохастического, так и целевого) воздействия, начало реагирования (если реагирование вообще будет иметь место) на возникшее воздействие окажется отложенным на некоторое время, аналогичное запаздыванию на старте. В дальнейшем объект (в зависимости от характера воздействия, его позитивности или негативности влияния на график движения, в зависимости от своего происхождения и своей сложности) может начать постепенно изменять величину скорости движения;
— если внешнее воздействие или собственное управляющее воздействие ошибочно направлено в сторону от трассы, то объект некоторое время будет продолжать по инерции двигаться по трассе (даже при очень сильном воздействии). Естественно, если позволяет быстрота реакции, то за период инерционного движения по трассе он может успеть скомпенсировать ошибочное воздействие. Но, в общем случае, реагирование на ошибочное воздействие начнется опять-таки с некоторой задержкой, что приведет к постепенному (ускоренному) уходу объекта с запланированной траектории. Начавшееся реагирование состоит в замедлении движения либо до нулевого значения (для организации возврата на трассу в том или ином месте, который можно рассматривать как начало нового этапа движения с аналогичными задержками и постепенными выходами в график движения), либо до такого значения, что бы система управления смогла с ходу совершить маневр по возврату на траекторию в той или иной точке, либо для организации новой траектории движения;
— если уход с трассы является необходимым (например, при преследовании другого объекта), то просто объект после оказания воздействия будет двигаться некоторое время по трассе по инерции (что аналогично задержке на старте) с постепенным в дальнейшем сходом с траектории. Следует обратить внимание на том момент, что в этом случае изменяется не столько модуль скорости движения (хотя это не исключено), а изменяется вектор скорости движения. Изменение вектора скорости адекватно появлению дополнительного вектора скорости соответствующего направления и модуля;
— при необходимости совершить поворот в узловой точке может потребоваться подготовка и проведение маневра по изменению направления движения не в самой узловой точке, а заранее с тем, чтобы не выскочить за пределы трассы из-за инерции объекта. При подходе к месту совершения маневра может потребоваться произвести некоторое торможение с тем, чтобы система управления успела совершить маневр без покидания объектом запланированной траектории движения;
– при неудачном маневре в узловой точке может произойти выход объекта (субъекта) за пределы расчетной траектории (выход за пределы траектории, следует отметить, может произойти и под внешним воздействием, и в результате ошибки собственной системы управления), что может потребовать либо возврата на трассу (соответственно с дополнительными затратами времени и ресурсов), либо приведет к необходимости прокладывания нового курса из точки, в которой система управления сможет корректно перенацелить объект на достигаемую финишную точку данного этапа (либо вообще может произойти изменение цели). Точка коррекции определяется из того условия, чтобы система управления к моменту достижения объектом этой точки успевала рассчитать новую траекторию до финиша этапа, определить условия маневра (а они должны измениться, если изменяется траектория движения) на финише этапа, и должна успеть провести сам маневр в точке коррекции. Не исключено, что может потребоваться остановка в точке коррекции. После проведения маневра объект должен ускориться до такого значения скорости, чтобы не потерять времени на прохождение этапа (а если была остановка в точке коррекции, то еще добавляется задержка в начале движения) и двигаться к финишу этапа (естественно возможны неоднократные сходы с трассы до достижения финиша этапа);
– при подходе к финишу также может потребоваться торможение до подхода к цели с тем, чтобы не проскочить ее. При неудачном торможении при подходе к цели может произойти проскакивание целевой точки, что потребует возврата в целевую точку, который (возврат) можно рассматривать как организацию дополнительного этапа, так как объекту предстоит сначала остановить свое движение, определить алгоритм возврата, что приведет к задержке возврата, начать двигаться, предварительно разогнавшись до расчетного (на этот случай) значения скорости движения, и закончить двигаться к целевой точке, постаравшись на этот раз удачно затормозить;
– система управления при первом же выходе за пределы трассы может отказаться от возврата на нее в точке схода или в точке ближайшего по ходу достигаемого узлового пункта (например, система управления просто не заметила возникшей ошибки), продолжая реализовывать расчетный алгоритм. В результате это может привести к возникновению отклонения от цели, обнаруживаемого по окончании реализации алгоритма движения, что потребует применения выше означенной процедуры по возврату к цели (в данном случае – по исправлению отклонения).
Из рассмотренных ситуаций можно сделать вывод, что необходимость совершать маневры по смене направления вектора скорости движения и ее величины, разгоны и торможения, задержки в начале движения, задержки в реагировании на воздействия, изменяющие вектор и модуль скорости, возвраты к цели приводят к отклонению значения реальной средней скорости движения объекта (субъекта) по траектории к цели и/или отклонению временных (ударение на последнем слоге) затрат на прохождение трассы по сравнению с запланированными величинами.
Представляется очевидным, что инерционность объекта проявляется в момент необходимости изменения режима движения объекта, что позволяет сделать тот вывод, что инерционность объектов аналитически может быть оценена как совокупность задержек начала перехода к тому или иному режиму и задержек, вызванных постепенностью (а не ступенчатым) переходом к запланированному режиму. Это проявление инерционности выше было обозначено как статическая составляющая инерционности.
Статическая составляющая наиболее просто и естественно учитывается как совокупное время задержки, необходимое для изменения режима движения.
После того или иного изменения режима движения в результате изменения воздействия или появления нового (дополнительного) воздействия, объект начинает ускоренное движение (если воздействие еще продолжает существовать), либо (если воздействие перестало существовать) совершает движение в форме, адекватной его специфике – совершает замедленное движение, переходит в состояние покоя или переходит к равномерному движению. Это проявление инерционности ранее было обозначено как динамическая составляющая.
Динамическая составляющая наиболее естественно учитывается как конечное ускорение или меры инерции (аналогичной массе в элементарной физике).
В статье 5 показано, что статическая составляющая и динамическая компонента инерционности могут вполне, при определенных условиях, быть представлены и в виде времени задержки, и в виде меры инерции. Поэтому в дальнейшем инерционность будет представлена двояко – время задержки или мера инерции – в зависимости от удобства исполнения задачи.
В общем случае на объект кроме инерционности воздействуют и другие факторы, приводящие к изменению скорости движения или отклонению временного (ударение на последнем слоге) графика. Влияние этих факторов на скорость движения можно определить, как величину отличия реальной средней скорости движения от запланированной средней скорости. Если планируемое время достижении цели обозначить через Т0, а совокупное отклонение от графика движения обозначить как (см. 18/1), то влияние этих факторов на скорость движения можно определить выражением (37):
выражение 37
Следует отметить, что влияние разнообразных факторов может привести как к росту средней скорости движения (соответственно к уменьшению затрат времени на достижение цели), так и к снижению средней скорости движения относительно запланированной величины (соответственно к увеличению затрат времени на достижение цели), поэтому в выражении (37) учитывается знак изменений как скорости, так и времени.
Как можно заметить из выражения (37), влияние инерционных факторов скрыто в совокупном параметре (см. 18/1),
более того, влияние факторов времени на скорость хотя и вполне однозначно, но не линейно, что уменьшает наглядность.
Но совершенно необязательно при оценке влияния инерционности (как и других факторов) на движение объекта в пространстве состояний приводить показатели к виду скорости ввиду указанной однозначности взаимосвязи.
Вполне достаточно оперировать собственно временами задержек и уменьшения задержек, тем более, что отношения будут иметь аддитивной характер.
Исходя из сказанного, можно в дальнейшем для оценки влияния различных факторов на характер движения использовать, в основном, показатели времени, прибегая к скоростным показателям для повышения наглядности и для оценки эффективности.