Полная версия
Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная
При переходе объекта из одного состояния в другое соответствующим образом изменяются значения его параметров, впрочем, верно и обратное утверждение.
Величина смещения определяется длиной отрезка [AB].
В свою очередь, при учете направления смещения, отрезок [AB] становится вектором {a}, длина которого определяет величину смещения, а направление вектора {a} определяет направление смещения рассматриваемого объекта в пространстве состояний.
Длина вектора {a} определяется как сумма квадратов разниц начальных и конечных координат смещения по всем параметрам, т.е.:
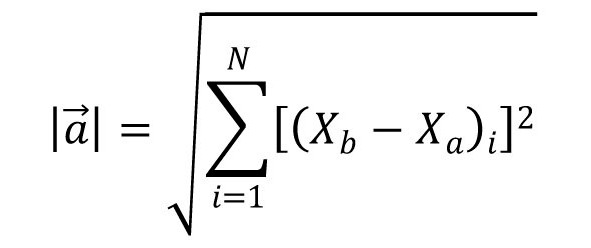
выражение 4.1
где Xb и Xa – соответственно конечные и начальные значения i-того параметра, количество которых составляет N.
Формула (4.1) позволяет определить величину смещения объекта в пространстве состояний в общем случае.
Формула (4.2) позволяет определить направление смещения объекта в пространстве состояний в общем случае:
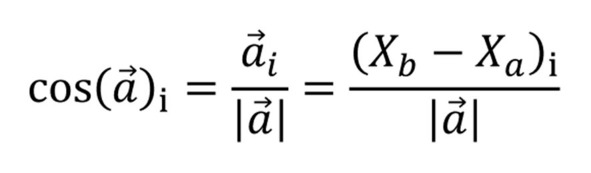
выражение 4.2
Как любой вектор, вектор смещения обладает определенными координатами. Как видно из рисунков 6, формул (1—4), правил сложения векторов (если начальное и конечное состояния изобразить в виде соответствующих векторов) координаты вектора смещения определяются как разница начальных и конечных значений соответствующих параметров, т.е. можно записать выражение (5) для вектора смещения:

выражение 5
где Xb и Xa – соответственно конечные и начальные значения i-того параметра, количество которых составляет N.
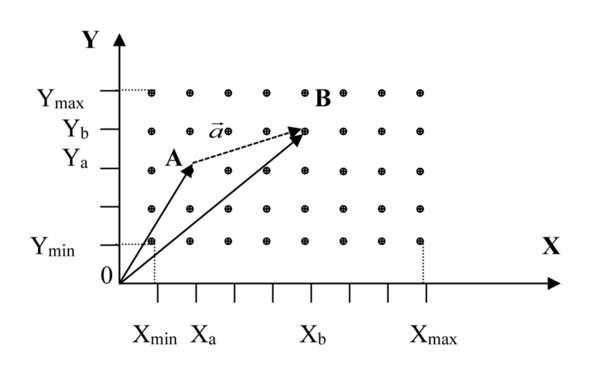
Рисунок 6.1 Вектор смещения в естественном положении
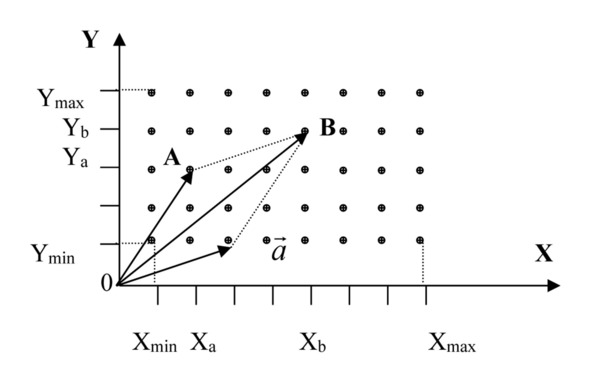
Рисунок 6.2 Вектор смещения после параллельного переноса
Рисунок 6.1 иллюстрирует ситуацию, при которой вектор смещения исходит из точки А, переводя объект в состояние В. Оба эти состояния представлены, в данном случае, векторами {OA} и {OB} соответственно, вектор смещения – это вектор {a}. Сложение по правилу треугольника векторов {OA} и {a} дает вектор {OB}. Координаты вектора смещения определяются выражением (5).
Рисунок 6.2. иллюстрирует ситуацию, при которой вектор смещения {a} умозрительно перенесен в начало координат с сохранением длины и направления вектора (параллельный перенос). При таком переносе сохраняются и величины проекций вектора смещения на координатные оси, которые, будучи исчислены относительно начала системы координат, являются собственно координатами вектора смещения. Результатом сложения вектора {OA} и вектора смещения {a} по правилу параллелограмма дает все тот же вектор {OB}. Этот факт позволяет утверждать, что координаты вектора смещения, расположенного там, где ему полагается быть, и координаты вектора смещения, перенесенного в начало координат тождественны друг другу. Таким образом, координаты вектора смещения {a}, полученные в выражении (5), тождественны истинным координатам.
Заметим, что для нормализованных параметров этот вывод достигается, в общем-то, автоматически.
1.3.1.2. Множественные воздействия
При наличии нескольких источников воздействия на объект последний будет совершать движение в пространстве состояний, которое (движение) должно включать в себя ту или иную реализацию всех воздействий.
Рассмотрим два полярных случая:
– на рисунке 7.1 на объект, изначально находящийся в состоянии А, оказываются последовательные воздействия, т.е. каждое следующее воздействие инициируется после реализации смещения от предыдущего воздействия,
– на рисунке 7.2 на объект, находящийся в состоянии А оказывается несколько воздействий одновременно (для наглядности величина и количество воздействий совпадает с предыдущим вариантом).
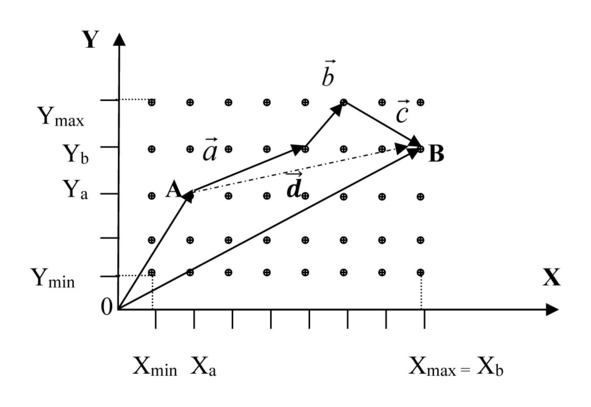
Рисунок 7.1 Вектор смещения, образующийся в результате ряда последовательных воздействий
Как видно из рисунка 7.1 на объект, находящийся в состоянии А, последовательно оказываются воздействия, приводящие к появлению векторов смещения {a}, {b} и {c} соответственно. В результате такого движения в пространстве состояний объект переходит в состояние В, вектор {OB} является результатом сложения векторов по правилу треугольников исходного вектора {OA} и совокупного вектора смещения {d} = {a} + {b} + {c}.
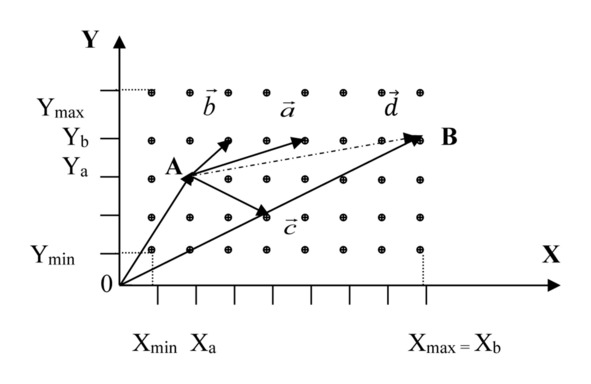
Рисунок 7.2 Вектор смещения, образующийся в результате одновременных воздействий
На рисунке 7.2 на объект оказывается сразу несколько воздействий, каждое из которых вызывает соответствующее смещение {a}, {b} и {c} соответственно. Можно убедиться, что если сложить векторы смещения по правилу параллелограмма, а потом результирующий вектор смещения {d} сложить с вектором исходного состояния {OA} либо по правилу треугольника, либо, предварительно параллельно сместив его в центр координат, сложить по правилу параллелограмма, мы получим вектор конечного состояния {OB}, который, при совпадении частных векторов смещения {a}, {b} и {c} в обоих случаях воздействия, тождественен вектору {OB}, полученного при последовательны воздействиях, см. рисунок 7.1.
Полученные результаты позволяют сделать тот вывод, что при движении объекта в пространстве состояний в результате множественного воздействия характер воздействия (параллельный, последовательный или смешанный) на объект не имеет значения для образования результирующего вектора смещения.
1.3.2. Управляющие воздействия
Управляющие воздействия, как и любые другие воздействия, вызывают смещение объекта в пространстве состояний на ту или иную величину, в зависимости от величины воздействия.
Единственным отличием управляющего воздействия от любого другого является то, что управляющее воздействие всегда, независимо от того является ли оно внешним или внутренним, целенаправленно (правда не всегда удается эту цель достичь, да и система управления не всегда корректно определяет целевое состояние и/или вырабатывает управляющее воздействие).
Поэтому в представленных материалах автор не будет выделять особым образом, если того не требует существо вопроса, управляющие воздействия из всей совокупности воздействий.
1.3.3. Корректирующие воздействия.
Необходимость в коррекции состояния появляется тогда, когда объект при перемещении в пространстве состояний под действием управляющего воздействия не достигает целевого состояния. Обычно такая ситуация возникает при наличии неучтенных воздействий на объект или неучтенных свойств объекта, которые и приводят к появлению ошибки при движении объекта к какой-либо цели. При этом неучтенные факторы могут действовать равно в точке старта, в точке финиша, на этапе движения от состояния к состоянию.
На рисунке 8.1 целевое состояние обозначено литерой В, а состояние, в которое на самом деле переместился объект, в дальнейшем будем называть реализованным состоянием, обозначено литерой В1. Между точками образуется смещение (вектор {BB1}), собственно являющееся ошибочным смещением.
Для того, чтобы объект оказался все-таки в требуемом состоянии, на него необходимо оказать некоторое воздействие, в первом приближении равное ошибочному смещению, для компенсации последнего, т.е. оказать дополнительное управляющее воздействие на объект.
На рисунке 8.2 показан вектор корректирующего воздействия (вектор {B1 B}), который переместит объект в целевое состояние В.
Очевидно, что такой подход позволяет считать корректирующее воздействие формой управляющего воздействия.
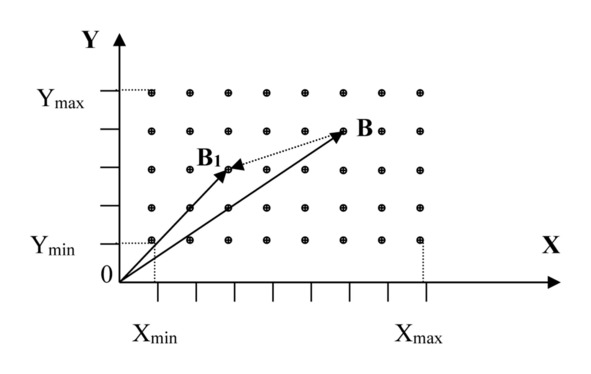
Рисунок 8.1 Смещение от целевого состояния
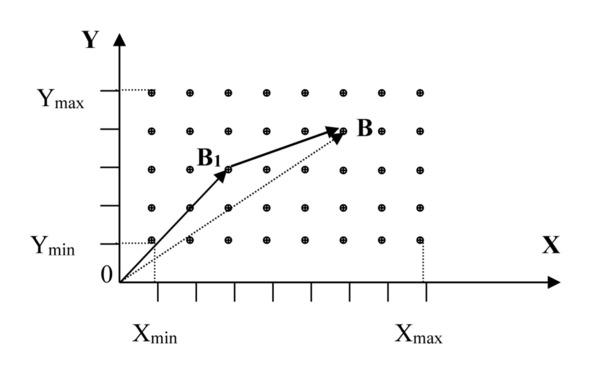
Рисунок 8.2 Корректирующее смещение к целевому состоянию
Теперь обратимся к рисунку 8.3. На этом рисунке вектор корректирующего воздействия {a} (смещения) был параллельно перемещен в начало координат. При сложении по правилу параллелограммов результат воздействия будет тот же, но полученная конфигурация векторов позволяет нам воспринимать корректирующий вектор как некий добавочный объект (или корректирующий объект), параметры которого тождественны его координатам, а сам он, будучи присоединен к основному объекту, позволит последнему достичь желаемого состояния (практически агент влияния).
Заметим, что этот вопрос (влияние объектов друг на друга) будет рассмотрен позже и подробнее, сейчас же ограничимся только обозначением существования такого фактора.
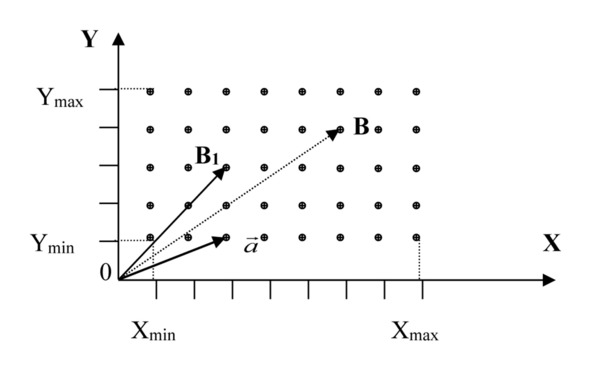
Рисунок 8.3 Образ корректирующего устройства
Таким образом, на настоящем этапе корректирующие воздействия можно рассматривать как частный случай управляющих воздействий, не забывая о возможности существования корректирующих объектов.
1.3.4. Вектор цели.
Как указывалось ранее, при оказании воздействия на объект, как со стороны его системы управления, так и со стороны сторонних объектов, означенный объект совершает движение в пространстве состояний.
Перед началом движения, если это разовый акт, либо перед каждым переходом в новое состояние при многоэтапном движении, объектом формируется направление перемещения и прогноз конечного состояния.
Прогнозируемое конечное состояние принято называть целью или задачей.
Между этими терминами, по мнению автора, существует определенное различие, заключающееся в том, что достижение цели осуществляется посредством решения задач. Из сказанного можно сделать тот вывод, что целью следует именовать то состояние, в которое в конечном итоге должен переместиться объект, а задачами следует именовать все промежуточные состояния, которые объект последовательно принимает на пути к целевому состоянию.
Заметим, что набор решаемых задач по пути к цели образует траекторию движения объекта в пространстве состояний, либо алгоритм достижения цели.
Как ранее указывалось, движение в пространстве состояний может быть одноактным процессом и многоэтапным. В первом случае вектор цели непосредственно указывает на конечное состояние, во втором случае кроме основного вектора цели существуют промежуточные векторы, определяемые выбранным алгоритмом прохода по пространству состояний. Эти векторы локальных целей более правильно именовать векторами задач.
На рисунке 9 изображена эта ситуация. Вектор {AB} является целевым вектором, а остальные векторы – векторы задач. Со всей очевидностью можно отметить, что вектор цели является суммой векторов задач.
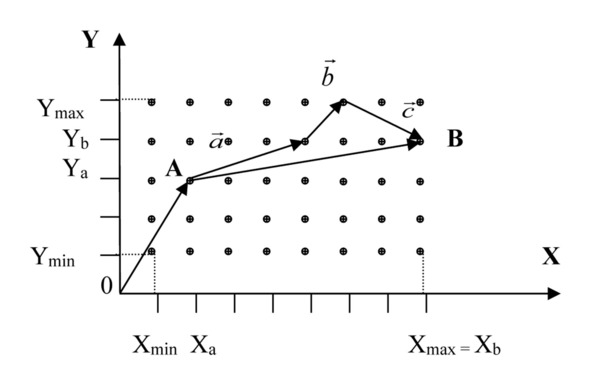
Рисунок 9 Вектор цели и векторы задач
Направление перемещения совпадает либо с вектором воздействия при одиночном воздействии, либо совпадающее с суперпозицией воздействий при множественном воздействии.
Прогноз конечного состояния определяется направлением предполагаемого смещения и силой воздействия.
Таким образом, вектор цели (вектор задачи) можно считать отображением воздействия на объект. Более того, векторы воздействия и векторы цели можно рассматривать как разные ипостаси (дуализм) одного и того же явления.
Поэтому, примем как очевидное, что с вектором цели можно производить такие же манипуляции, что и с вектором воздействия.
Следует отметить, забегая несколько вперед, что существуют объекты, которые можно считать разумными или, более скромно, самоуправляющимися. Основной отличительной особенностью таких объектов можно считать способность самостоятельно, исходя из оценки окружающей действительности, формировать для себя цели и определять задачи, способствующие достижению назначенных целей.
В дальнейшем, исходя из целей и задач, система управления такого объекта формирует воздействия на сам объект и, если требуется, индуцирует воздействие со стороны окружающей среды, которых (воздействий) должно хватить для решения задач и достижения цели.
Таким образом, можно наблюдать обратный дуализм между воздействием и целью, т.е. не воздействие определяет цель, а цель определяет воздействие.
Но, думается, указанная ситуация лишь подтверждает наличие взаимообусловленности цели объекта и воздействия на объект.
Более того, обычно на практике любой самоуправляющийся объект не только сам ставит перед собой цели, но и вынужден реализовывать сторонние воздействия, например: пинок товарища, если не успел увернуться, вполне четко и недвусмысленно определит направление предстоящего движения, либо суровый приказ жены/тещи, равно как и нытье детей, которые можно считать формой стороннего воздействия, заставляет субъекта (по традиции разумные объекты принято именовать субъектами) воспринимать этот процесс как источник цели.
Отметим в конце данного раздела, что изложение вопроса вектора цели проводилось без учета факторов, приводящих к появлению ошибочных смещений, так как, по мнению автора, учет таковых воздействий не внесет принципиальных изменений в понимание вопроса.
И в заключение дадим определение вектора цели:
Вектор, проложенный в пространстве состояний объекта между текущим состоянием и прогнозируемой целью, будет в дальнейшем именоваться вектором цели.
1.3.5. Величина воздействия. Результат воздействия.
При оценке величины воздействия на объект следует исходить из того допущения, что воздействие в параметрическом пространстве состояний может быть отображено в виде некоторого вектора либо как некоторый объект, имеющий вполне конкретные значения координат.
При таком подходе модуль вектора может быть показателем величины воздействия, а направляющие косинусы могут определять направление воздействия в собственном пространстве состояний данного воздействия.
Как отмечалось ранее, объект также описывается набором параметров, определяющих его пространство состояний. При этом набор параметров воздействия может совпадать с набором параметров объекта воздействия, но может и не совпадать (полностью или частично).
При частичном несовпадении набор параметров воздействия может быть или подмножеством набора параметров объектов, или имеется ненулевое пересечение наборов параметров воздействия и объекта.
В этих случаях будет уместно говорить не просто о формальной величине воздействия, а о рабочей величине воздействия или о действующем воздействии (извините за некоторую тавтологию) на данный объект, так как воздействие может (но необязательно будет) производиться только по параметрам, имеющим общность или сродство (или, как говорят в биохимии, являющимися лигандными), именуемыми в дальнейшем общими параметрами (часто параметры, участвующие в организации воздействия, именуются в обычной жизни зоной, областью или группой контакта).
Если имеется ненулевое пересечение параметров воздействия и объекта, то можно говорить о проекции воздействия на объект и рассматривать уже проекцию полнопространственного воздействия в качестве действующего воздействия на анализируемый объект.
При полном несовпадении параметров воздействия и объекта невозможно говорить о наличии воздействия на анализируемый объект.
Для оценки величины воздействия на объект, при неполном совпадении контентов воздействия и объекта, следует исходить из того, что воздействие является разновидностью взаимодействия, поэтому воздействие полностью реализуется в тот момент, когда не только имеются наборы общих параметров, обеспечивающих принципиальную возможность воздействия, но и значения параметров анализируемого объекта и средства воздействия совпадут. Если воздействие и объект не имеют общих параметров, то взаимодействие не произойдет. Если, при наличии общих параметров, невозможно уравнивание значений общих параметров, то и в этом случае не произойдет взаимодействие.
Поэтому в качестве величины воздействия на объект представляется возможным принять модуль вектора, построенного на параметрах, по которым не только возможно воздействие на объект, но и имеется совпадение значений параметров. Возникающие при этом направляющие косинусы определят направление воздействия на объект, т.е. целевой вектор (этот вектор существует в пространстве состояний объекта).
В результате воздействия на анализируемый объект последний претерпит те или иные изменения, проявит ту или иную реакцию. Величина изменений, определяемых векторным образом, может оказаться не равной изначально рассчитанной величине воздействия, что позволяет рассматривать результаты воздействия в качестве отдельного фактора, требующего своей оценки.
Результат воздействия определяется не только величиной воздействия, но и поведенческой реакцией объекта в период существования воздействия.
При этом процесс взаимодействия объекта и воздействия может происходить в несколько этапов:
– подготовка к взаимодействию;
— период непосредственного воздействия;
– период после снятия воздействия.
До начала воздействия не все значения, как указывалось ранее, общих параметров объекта и субстрата (носителя, источника или переносчика) воздействия могут совпадать. Поэтому процессу полноценного воздействия может предшествовать, хотя бы в качестве попытки, процесс сближения значений параметров объекта и средства воздействия. Этот процесс представляет собой смещение объекта в пространстве состояний либо абсолютное, при сохранении состояния источника воздействия, либо относительное, при взаимном изменении состояния объекта и источника воздействия.
Величина и направление смещения, необходимого для достижения более полного контакта между источником воздействия и объектом, могут быть приняты в качестве первого слагаемого в оценку интегрального (обобщенного) результата воздействия.
В качестве замечания следует отметить, что сближение источника воздействия и объекта не могут происходить при полном неведении участников событий относительно друг друга. Это означает, что процесс сближения должен последовать за началом частичного взаимодействия либо участники должны иметь, оба или хотя бы один из участников, какую-либо информацию о своем партнере по контакту, что подразумевает, в свою очередь, существование на этапе, предваряющем рассматриваемое воздействие, прямого или опосредованного взаимодействия любого плана, в том числе и информационного.
Но на факте уравнивания значений параметров воздействия и объекта (что можно полагать подготовкой к взаимодействию) процесс воздействия не заканчивается.
За период существования непосредственного воздействия могут изменить свое значение не только параметры-рецепторы (следует отметить, при этом, что несогласованное изменение значений параметров-рецепторов может привести к прекращению взаимодействия или его изменению), но и другие параметры объекта. В этом случае результат воздействия будет равен величине смещения объекта в параметрическом пространстве за период непосредственного воздействия. При этом смещение объекта может быть:
– пассивным, т.е. при отсутствии воздействия системы управления или отсутствии самой системы управления, либо при незначительности воздействия системы управления, влиянием которого на смещение объекта можно пренебречь. В этом случае величина смещения за период воздействия будет адекватна величине воздействия;
– активным, т.е. под значимым управлением собственной системы управления, что естественным образом корректирует направление и величину смещения объекта, являясь, по сути, еще одним воздействием на изначально пассивный объект. Под значимостью воздействия системы управления понимается то, что сила воздействия системы управления на объект в период непосредственного воздействия внешнего источника (или другого источника, не являющегося системой управления) не может быть не учтена;
— трансформационным. Такое движение имеет место, когда воздействие на объект становится разрушительным или синтезирующим, либо происходит вырождение или усложнение объекта. Разрушение или синтез в общем случае характеризуются прекращением существования изначально анализируемых объектов с потерей взаимодействия с источником воздействия и появлением новых объектов-наследников, имеющих собственные, присущие только им, наборы параметров и интервалы допустимых значений. Вырождение или усложнение объектов в общем виде сопровождается изменением набора параметров и интервалов допустимых значений параметров существующих анализируемых объектов без потери, скорее всего, взаимодействия с источником воздействия. Трансформационное движение является переходом в пространстве состояний, хотя и со своей спецификой в каждом случае. Если рассматривать движение трансформируемого объекта в собственном пространстве состояний, то движение вырождающегося или усложняющегося объекта сопровождается соответствующим изменением характеристик пространства состояний и контента состояний объекта. В то же время, разрушение или синтез объекта прежде всего сопровождается исчезновением собственного пространства состояний анализируемого объекта (аналогия с коллапсом) и появлением новых собственных пространств состояний со своими специфичными параметрами для вновь образуемых объектов со своими специфичными контентами состояний, в рамках которого они совершают то или иное инерционное после воздействия движение (либо испытывают новое воздействие). В рамках обобщенного пространства состояний (тяготеющего к глобальности) модификация объектов (усложнение или вырождение) выглядит как перемещение объекта из одной части обобщенного пространства в другую с возможным изменением набора параметров и интервалов доступных значений. Разрушение или синтез объектов в обобщенном пространстве состояний будут выглядеть несколько иным образом: непосредственное воздействие на исходный объект или объекты сохраняется до тех пор, пока существует хотя бы минимальная связь с параметрами реципиентами исходных объектов; существует определенная трудность в фиксации этого момента, так как в процессе трансформации объекты так или иначе изменяются, поэтому для упрощения анализа можно принять в качестве периода непосредственного воздействия (если оно не прекратилось раньше по индивидуальной или взаимной инициативе источника воздействия и объекта) период однозначной фиксации наблюдаемых объектов как исходных, т.е. до наступления момента дезинтеграции или начала слияния; дальнейшее изменение объектов, слияние или разрушение, является либо инерционным, либо имеет место случай непосредственного воздействия уже на объекты-наследники; в момент фиксации прекращения существования исходных объектов они в обобщенном пространстве состояний совершают моментальный (фазовый) переход в нулевую точку пространства состояний (происходит обнуление исходных объектов), а объекты-наследники совершают моментальный переход из нулевой точки в ту точку пространства, в которой начнется их существование и определяются их собственные наборы параметров и контенты состояний. Смещение модифицируемых объектов в период непосредственного воздействия должно рассматриваться как результат воздействия, при потере взаимодействия объекта и источника воздействия величина смещения становится слагаемым в интегральную оценку результатов смещения. Совокупное векторное движение предшествующих объектов в нулевую точку и объектов-наследников к своему новому стартовому состоянию также должно быть присовокуплено в интегральный результат воздействия, так как это движение происходит уже после потери взаимодействия источника воздействия и объекта, ввиду того, что исходный объект в этот момент обнулился. В интегральный результат можно также отнести и инерционное движение наследников после их образования (или инерционную составляющую движения, если на наследников оказывается какое-либо дополнительное воздействие).