

Полная версия
Навигационная имплантология. Практическое руководство для практикующих имплантологов
• Универсальность: DSN не зависит от системы имплантатов (можно использовать любую систему имплантатов). Хирургический план может быть изменен в любое время, даже во время операции с минимальной задержкой. Внутриоперационные отклонения от предварительно определенного хирургического плана видны оператору в реальном времени, что позволяет немедленно вносить коррективы. DSN позволяет прямую визуализацию операционного поля в любое время. Наконец, DSN может быть независимым от инструмента, обеспечивая большую гибкость врачу, что достигается за счет нанесения координатных тегов на различные инструменты, такие как турбинный или низкоскоростной наконечники, ультразвуковой скейлер и другие. Однако это в настоящее время верно только для одной из навигационных систем, Navident от ClaroNav.
• Проверка в реальном времени: DSN позволяет проводить проверку в реальном времени остеотомий и установленных имплантатов, а также реставрацией.
• Визуализация в реальном времени: DSN позволяет в реальном времени визуализировать окружающие анатомические структуры. Это критически важно, когда вмешательство проходит около нижнего альвеолярного нерва (IAN), ментального отверстия, верхних пазух, птеригоидного комплекса, а также вблизи соседних зубов или имплантатов.
• Эргономика: Оператор не смотрит вниз и/или не наклоняется к операционному полю. Вместо этого врач смотрит прямо на компьютерный экран на навигационной установке, сохраняя правильную осанку.
• Независимость от фидуциальных маркеров: хотя это преимущество в настоящее время доступно только в одной системе (Navident от ClaroNav), независимость от фидуциальных маркеров означает, что система использует высококонтрастные ориентиры, уже существующие у пациента (зубы, кость), вместо внешних фидуциальных маркеров, встроенных в стент. Отсутствие необходимости изготовления предоперационного стента и возможность использовать одно изображение CBCT для диагностики, планирования и выполнения операции – это два наибольших преимущества независимости от фидуциальных маркеров.
Как видно, динамические навигационные системы обеспечивают немного большую, но сопоставимую с навигационными шаблонами точность переноса данных виртуального планирования в реальность клинического случая, к тому же они имеют значительно меньше ограничений по сравнению со статической навигацией. И все же, высокая стоимость и отсутствие поддержки пользователей в России не позволили автору оценить использование динамических навигационных систем в своей практике.
Роботизированная имплантология
Роботизированная хирургия в общей хирургии уже давно не является фантастикой, и ее клиническое применение стремительно развивается из-за ее высокой точности и минимальной инвазивности. В 1996 году была разработана хирургическая роботизированная система Da Vinci Surgical Robot System (Intuitive Surgical, Калифорния, США), и хирургические роботы этой системы добились больших успехов в медицинской сфере, сделав сложные операции более безопасными и менее инвазивными.
С появлением хирургической роботизированной системы Da Vinci Surgical Robot System многие ученые начали применять роботов в стоматологии, включая эндодонтию, ортодонтию, челюстно-лицевую хирургию, протезирование и имплантологию. В 2004 году Butscher W и соавторы в статье «Robot and method for bending orthodontic archwires and other medical devices» описали, как изобрели робота для гибких дуг под названием «SureSmile», который может изгибать ортодонтические дуги для каждой клинической ситуации автоматически и более точно, чем человек.

Рис. 2.13. Хирургическая роботизированная система Da Vinci Surgical Robot System (Intuitive Surgical, Калифорния, США)
В 2010 г. Burgner J и соавторы в материале «Ex vivo accuracy evaluation for robot assisted laser bone ablation» упоминают о том, как успешно изготовили робота для проведения ортогнатической остеотомии на основе короткоимпульсной лазерной абляции. В 2014 году Wang DX и соавторы в статье «Preliminary study on a miniature laser manipulation robotic device for tooth crown preparation» описывают, как разработали миниатюрное роботизированное устройство, выполняющее автономное препарирование зубов под коронки.
В 2017 году был разработан первый в мире коммерческий стоматологический робот Yomi, одобренный для клинического применения в Соединенных Штатах Америки управлением по санитарному надзору за качеством пищевых продуктов и медикаментов США. Так же, как и Da Vinci, робот Yomi является полуавтономным роботом, и для выполнения имплантации ему требуется управление хирурга. В 2021 году Bolding и соавторы в исследовании «Accuracy of haptic robotic guidance of dental implant surgery for completely edentulous arches» использовали Yomi для установки 38 имплантатов и сообщили о угловом отклонении имплантата (AnD) 2,56 ± 1,48 градуса, смещении центра платформы имплантата (EP) 1,04 ± 0,70 мм и смещении апекса имплантата (ApD) 0,95 ± 0,73 мм.
В конце 2017 г. Zhao и соавторы представили первую в мире полностью автономную систему установки зубных имплантатов (Yakebot, Beijing, China), описанную в статье «Madfa AA, Senan EM, Yue X-G. Autonomous robotics: a fresh era of implant dentistry… is a reality! Tensile stress distribution in maxillary central incisors restored with cast-made and prefabricated dental posts», чем открыли цифровую эру дентальной имплантации. В эксперименте, выполненном на животных в 2021 г. Bai SZ, Ren N, Feng ZH и соавторы статьи «Animal experiment on the accuracy of the autonomous dental implant robotic system», упомянули результаты показавшие, что погрешность для центра платформы имплантата (EP) составила 0,27 ± 0,15 мм, погрешность для апекса имплантата (ApD) 0,25 ± 0,22 мм, погрешность для углового отклонения имплантата (AnD) 0,99 ± 0,52 градуса. Это доказало, что система Yakebot более точна, чем любые другие методы переноса виртуального планирования в реальную клиническую ситуацию.
В начале 2021 года Национальное управление по медицинским продуктам Китая санкционировало две автономные роботизированные системы для имплантации зубов: Remebot (регистрационный номер 20213010713) и Yakebot (регистрационный номер 20213010215). Remebot и YakeBot являются полностью автономными роботизированными системами, их роботизированные манипуляторы могут выполнять хирургические вмешательства без участия человека. В 2022 году Yang и соавторы использовали Remebot для тотальной реабилитации беззубого пациента, получили результаты точности переноса: погрешность для центра платформы имплантата (EP) составила 0,56 ± 0,24 мм, погрешность для апекса имплантата (ApD) 0,61 ± 0,23 мм и погрешность для углового отклонения имплантата (AnD) 0,99 ± 0,52 градуса.

Рис. 2.14. Роботизированные имплантологические системы. А – Yomi, В – YakeBot, С – Remebot
Преимущества роботизированной имплантологии:
• Самая высокая точность: Роботизированные системы обеспечивают самую высокую точность переноса позиции имплантата из виртуального плана в реальную клиническую ситуацию, сводя на нет риск отклонения имплантата от оптимального положения.
• Минимизация хирургических рисков: Автоматизированный контроль за процессом установки имплантатов существенно снижает вероятность повреждения окружающих тканей и анатомических образований.
• Минимальная инвазивность наряду с высокой скоростью. Эффективность роботизированных систем значительно сокращает продолжительность хирургического вмешательства, а также обеспечивает минимальную инвазивность процедуры, что способствует более быстрому восстановлению пациента.
Роботизированная имплантология находит применение во многих клинических случаях от простых до сложных, включая установку одиночных имплантатов, полную реабилитацию беззубого челюстного отдела и случаи с ограниченным количеством костной ткани. Роботизированные системы могут быть использованы для выполнения как стандартных, так и комплексных процедур с улучшением качества и предсказуемости исхода.

Рис. 2.15. Если при работе полуавтономного имплантологического робота Yomi требуется помощь хирурга, то при работе полностью автономного имплантологического робота YakeBot хирургу остается только смотреть
Робот YakeBot для автономной челюстно-лицевой хирургии является самым выдающимся продуктом среди роботизированных имплантологических систем. Этот робот разработан для того, чтобы помочь хирургам точно выполнять малоинвазивные операции по установке имплантатов с субмиллиметровой точностью. Перед операцией необходимо провести анализ мягких и твердых тканей, а также спланировать операцию по установке имплантатов с помощью прилагаемого программного обеспечения. Во время операции, с помощью высокоточных датчиков технического зрения и динамических датчиков силы, робот точно ориентируется и выполнит подготовку остеотомических каналов. Необходимых для установки имплантатов, а также установку имплантатов. Врач может управлять роботом с помощью контрольной педали.
Благодаря своим передовым возможностям этот робот может значительно улучшить навыки стоматолога, а также увеличить безопасность пациента и создать для него позитивный опыт. Компания Beijing Yakebot Technology Co., Ltd., разработавшая робота YakeBot, любезно предоставила материалы: полное описание, научные статьи и клинические случаи применения робота YakeBot в имплантологии.

Рис. 2.16. Робот YakeBot для автономной челюстно-лицевой хирургии. «Рука» робота YakeBot
Клинический случай установки имплантатов с помощью автономного робота для стоматологической имплантации (autonomous dental implant robot (ADIR)) с последующей немедленной нагрузкой
выполнен: Zhiwen Li, DDS, PhD, Rui Xie, MSD, Shizhu Bai, DDS, PhD, and Yimin Zhao, DDS, PhD (любезно предоставлен компанией Beijing Yakebot Technology Co., Ltd)
61-летняя женщина обратилась в Центр цифровой стоматологии Школы стоматологии Четвертого военно-медицинского университета с жалобой на снижение жевательной функции из-за потери второго премоляра и первого моляра нижней челюсти справа. Предоперационная оценка включала общее и стоматологическое обследование, после чего было предложено протезирование несъёмным мостовидным протезом с опорой на два имплантата и установка двух имплантатов с использованием автономного робота для стоматологической имплантации (ADIR).
Лечение было одобрено Медицинским этическим комитетом Школы стоматологии (номер одобрения IRB-REV 2020050). Было получено информированное согласие, и соблюдался принцип защиты конфиденциальности. В рамках предоперационной подготовки проведена конусно-лучевая компьютерная томография (КЛКТ) (HiRes3D; LargeV Instrument Corp) и сохранена в формате цифровой визуализации и коммуникаций в медицине (DICOM). Зубы и мягкие ткани были отсканированы с помощью внутриротового сканера (CS 3600; Carestream Dental) и экспортированы в стандартном формате тесселяции (STL). Данные DICOM и STL были импортированы в программное обеспечение для предоперационного планирования (DentalNavi; YakeRobot Technology Ltd) для трехмерной реконструкции и совмещения.
Высота и ширина альвеолярного гребня в области второго премоляра нижней челюсти справа составляли 19,0 мм и 5,8 мм, а высота и ширина альвеолярного гребня в области первого моляра нижней челюсти справа составляли 17,8 мм и 5,4 мм, что было достаточно для установки имплантатов (TX 4,0×9 мм, TX 4,0×11 мм, AstraTech OsseoSpeed; Dentsply Sirona).

Рис. 2.17. Клинический процесс установки имплантатов с использованием ADIR
Положение двух имплантатов было спланировано с учетом принципа «от коронки вниз» с расположением в центре будущей реставрации, с безопасным расстоянием не менее 2 мм от нижнего альвеолярного нерва. Временный протез был спроектирован с двумя крыльями для позиционирования в полости рта за счет окклюзионной поверхности соседних зубов. В теле реставрации спроектированы два канала, соответствующие положению временных абатментов, которые будут фиксированы к имплантатам, диаметр каждого канала на 0,6 мм больше, чем у диаметр временного абатмента.
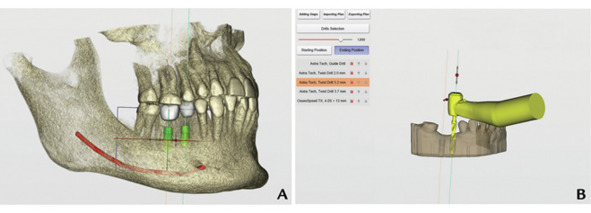
Рис. 2.18. А – Предоперационное планирование на виртуальной модели. В – Шаги остеотоми и последовательность использования фрез
Последовательность использования фрез для остеотомий была определена в соответствии с хирургическими руководствами и качеством кости в беззубой области. Глубина, скорость вращения (менее 1200 об/мин) и подача (менее 0,5 мм/с) были установлены для каждой фрезы.
Также до операции были спроектированы хирургические аксессуары: держатель для хирургического маркера, опору для открывания рта и поддон для отсасывания крови и физиологического раствора во время остеотомии. Отверстия для контроля установки аксессуаров были спроектированы в держателе маркера и поддоне для отсасывания для интраоперационной регистрации. Временный протез, держатель маркера, опора и поддон для отсасывания были изготовлены до операции с помощью трехмерной печати (Pro S95; SprintRay Co). Постпечатная обработка: удаление поддержек, очистка и постполимеризация были выполнены в соответствии с рекомендациями производителя.
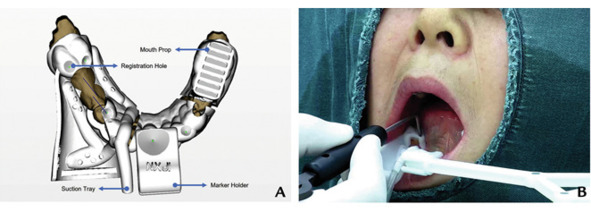
Рис. 2.19. А – Дизайн хирургических аксессуаров и регистрационных отверстий. В – Обозначение зондом регистрационных отверстий
В рамках хирургического вмешательства после дезинфекции полости рта пациента (5,0 г/л йодофор; ShanDong LIRCON Medical Technology Inc Co) выполнена инфильтрационная анестезия 4% раствором артикаина с адреналином 1/100 000 (Primacaine Adrenaline; ACTEON Group). Пациентка находилась в сидячем положении в течении всей хирургической процедуры. Хирургические аксессуары были зафиксированы на зубах в полости рта. Хирургический маркер был установлен в держатель, и интраоральная регистрация маркера была завершена путем установки регистрационного зонда в 5 отверстий для регистрации поочередно.

Рис. 2.20. Пациент готов к операции. Аксессуары установлены, регистрация проведена, пути записаны
Ручной инструмент, подключенный к концевому эффектору робота, был вручную помещен в рот пациентки хирургом и достиг запланированного начального положения сверления. Затем инструмент был удален изо рта, и путь был записан в компьютер робота путем идентификации маркера на концевом эффекторе робота с использованием активной оптической системы отслеживания позы (fusionTrack 250; Atracsys LLC).
Во время операции ADIR автономно следовал этому пути, чтобы безопасно входить и выходить изо рта, не касаясь зубов или мягких тканей. Затем ADIR автономно поэтапно выполнял остеотомии и установку имплантатов без откидывания лоскута вдоль записанных путей в соответствии с предоперационным планом. Фрезы менялись хирургом вне полости рта. Глубина и угол фрезы по сравнению с запланированным положением имплантата отображались в реальном времени на экране. Хирург постоянно контролировал процедуру через экран и управлял всеми движениями робота с помощью педали, включая вход в рот, остеотомию и выход. Хирургический план мог быть изменен во время операции, и движение робота могло быть остановлено в любое время, если это было необходимо.
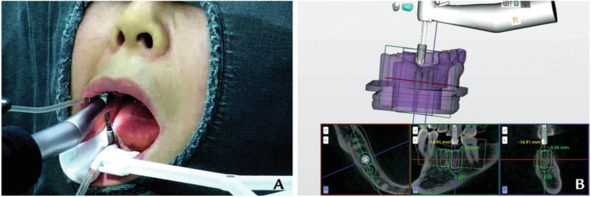
Рис. 2.21. А – установка имплантата ADIR. В – Позиция инструмента: глубина и углы, их соответствие плану, отображаются в реальном времени на экране ADIR и позволяют следить за ходом операции
В результате два имплантата были успешно установлены ADIR в запланированные положения без каких-либо интраоперационных осложнений. Поверх имплантатов установлены скан-абатменты для внутриротового сканирования с целью оценки точности установки имплантатов. Отклонения между фактическим и запланированным положением двух имплантатов были рассчитаны в программном обеспечении.
Рис. 2.22. А – Скан-абатменты фиксированные к установленным ADIR имплантатам. В – Оценка точности соответствия фактического и планируемого положения имплантатов
Результаты показали, что корональное отклонение составляло 0,26 мм, апикальное отклонение – 0,28 мм, а угловое отклонение – 0,40 градусов для имплантата второго премоляра нижней челюсти справа, и 0,32 мм, 0,44 мм, 1,16 градусов для имплантата первого моляра нижней челюсти справа. Послеоперационная рентгенограмма показала, что 2 имплантата были хорошо установлены и параллельны. Первичная стабильность имплантатов, установленных в области второго премоляра и первого моляра нижней челюсти справа, составляла 74 и 72 (Osstell ISQ; Osstell AB org) соответственно. Временные абатменты были фиксированы к имплантатам, после чего временный протез, изготовленный до установки имплантатов, был установлен поверх без каких-либо корректировок. Рентгенограммы через 3 месяца показали отсутствие резорбции кости вокруг двух имплантатов, и был изготовлен постоянный протез. Послеоперационных осложнений не возникло. Пациентка была удовлетворена операцией и протезированием.
Рис. 2.23. А – Послеоперационная рентгенограмма. В – Установлен временный мостовидный протез
Рис. 2.24. А —Рентгенограмма спустя 3 месяца после операции. В – Выполнено постоянное протезирование
В этом клиническом случае автономный робот для стоматологической имплантации выполнил установку имплантатов с высокой точностью. Установка имплантатов с использованием ADIR обладает преимуществами статических хирургических шаблонов и динамической навигации, и при этом лишена их недостатков. Во время процедуры хирургу необходимо было только сосредоточиться на положении и угле сверла, отображаемых в реальном времени на экране, нет необходимости наблюдать за операционной зоной, также целевое положение имплантата может быть изменено в зависимости от хирургической ситуации.
Хирургический инструмент полностью контролируется роботизированным манипулятором, а не удерживается хирургом, что устраняет влияние неопытности хирурга на точность, а также может эффективно снизить утомляемость хирурга. Отсутствие необходимости держать инструмент является основным отличием автономного робота от роботов, используемых для помощи в установке имплантатов.
Операционный участок не закрыт телом шаблона, соответственно не ухудшается охлаждение хирургических фрез. Кроме того, накусочная опора может помочь пациенту долгое время держать рот открытым, а поддон для отсасывания предотвратит аспирацию жидкости пациентом в сидячем положении. Ассистент не требуется для отведения щеки и эвакуации слюны во время процедуры, что делает остеотомии более эффективными.
Безопасность является важным принципом для установки имплантатов с использованием системы ADIR. Весь процесс контролируется хирургом, а движения робота управляются педалью. Хирург может быстро остановить все действия робота в ответ на возможные чрезвычайные ситуации, такие как внезапное движение пациента. Безопасное расстояние имплантата от жизненно важных структур и медленная подача обеспечивали достаточное время для реакции хирурга. Кроме того, запись пути гарантирует, что хирургические инструменты не повредят мягкие ткани и оставшиеся зубы пациента при автономном входе и выходе ручного инструмента изо рта пациента.
Недостатками процедуры являются необходимость в разработке нескольких персонализированных хирургических аксессуаров до операции, что снижает эффективность планирования. Для решения этой проблемы в будущем могут быть использованы универсальные аксессуары. Калибровка робота и пространственная регистрация до операции требуют дальнейшего упрощения. Устройства робота также занимают пространство в операционной. Для данного пациента точность установки имплантатов с использованием ADIR была удовлетворительной. Однако неизвестно, является ли точность ADIR лучше, чем у статических направляющих и динамической навигации. Необходимы клинические исследования и дополнительные отчеты о случаях для оценки точности ADIR.
РЕЗЮМЕАвтономный робот для стоматологической имплантации достиг высокой точности установки имплантатов и удовлетворительных результатов для пациента. Однако процесс требует дальнейшего повышения эффективности.
Развитие роботизированной имплантологии продолжает набирать обороты с обещанием дальнейшего улучшения технологий и расширения их возможностей. Исследования и инновации в области материаловедения, искусственного интеллекта и мехатроники обещают сделать процедуры еще более безопасными, эффективными и доступными для широкого круга пациентов.
К сожалению, на момент подготовки руководства автор не имел возможности оценить применение роботизированной имплантологии в клинической практике, поэтому в данном руководстве она не будет рассмотрена подробнее.
Глава 3. История навигационной имплантологии
Ранние методики планирования
Появление имплантологии позволило врачам стоматологам предложить новые варианты лечения пациентам, страдающим адентией. Первоначально имплантаты использовали преимущественно для лечения полной адентии нижней челюсти, на верхней челюсти удержание съемного протеза было лучше, чем на нижней, устанавливая 4—5 имплантата в области подбородка, между ментальными отверстиями, с немедленным протезированием условно съёмным гибридным протезом (литой каркас, гарнитурные зубы, акриловая облицовка), так называемый Шведский протокол.
Открытие принципа оссеоинтеграции расширило показания для имплантации для большинства случаев адентии, были разработаны протоколы протезирования обеих челюстей, в том числе и в случае частичной адентии. Однако анатомические структуры, такие как нижний альвеолярный нерв или верхнечелюстной синус, накладывали ограничения и требовали проводить планирование и выбор имплантата для каждого клинического случая.
Планирование операции проводилось на основе рентгеновского исследования, основным методом являлась ортопантомография, так как этот метод давал обзор всех анатомических образований относительно участка имплантации и имел фиксированное проекционное увеличение 25% для большинства аппаратов, что позволяло достаточно точно определиться с вертикальными размерами.
Рис. 3.1. Трассировка ОПТГ, выбор размера имплантата с использованием шаблона из прозрачного пластика
Некоторые производители имплантатов разработали шаблоны из прозрачного пластика, содержащие линейки и изображения имплантатов, увеличенные на 25%, для наложения на пленочную ортопантомограмму или ее трассировку (полупрозрачная бумага (калька) накладывалась на подсвеченную ортопантомограмму, и карандашом обводились все значимые анатомические элементы). Таким образом, клиницист мог подобрать наиболее подходящие имплантаты по длине и определиться с местом и протоколом их установки. Но двухмерная рентгенография не позволяла оценить трехмерную анатомию участка, а тем более провести планирование с учетом будущей ортопедической конструкции.
Аналоговая навигация
История применения шаблонов в имплантологии начинается с основной проблемы имплантологии начального периода, обусловленной тем фактом, что установку имплантата выполнял хирург, ориентируясь на анатомические условия (количество кости, мягкой ткани и др.), а протезирование выполнял врач ортопед, который предъявлял к имплантатам совершенно другие требования (соответствие осей, достаточное для протезирования пространство, расположение в центре коронки замещаемого зуба и тд,). Впрочем, зачастую положение установленных хирургом имплантатов не удовлетворяло ортопеда.