Полная версия
Современные беспилотные летающие аппараты
Аккумуляторная батарея представлена на рис.3.24, а последовательное и параллельное соединения аккумуляторов в батарее показано на рис. 3.25.
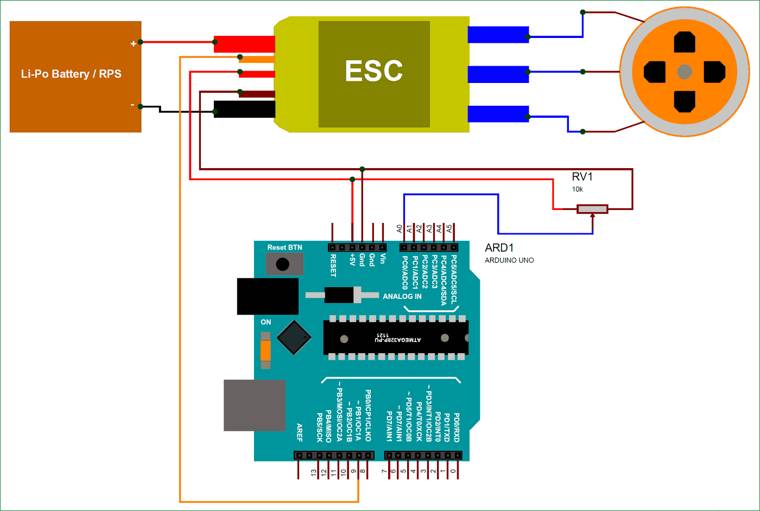
Рис. 3.24. Аккумуляторная батарея
При последовательном соединении аккумуляторов, образующих батарею, итоговое напряжение будет равно сумме напряжений всех входящих сборку элементов или банок.
Разъем это провод образует силовой вывод аккумулятора, к которому впоследствии и будут подключаться потребители энергии.
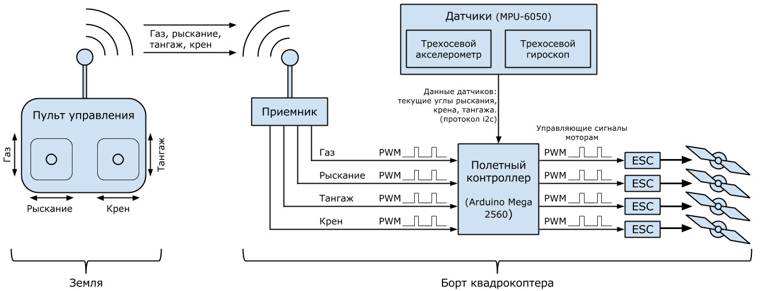
Рис.3.25. Виды соединения аккумуляторов в батарее.
Также к выводам отдельных аккумуляторов припаивают провода, из которых образуется так называемый балансировочный разъем —он необходим для контроля напряжения на каждой банке, рис.3.26.

Рис. 3.26. Балансировочный разъем
Емкость аккумулятора показывает, как долго батарея может отдавать номинальный ток. Емкость измеряется в миллиампер*часах (мАч) или Ампер*часах (Ач), в зарубежном написании mAh или Ah. Чем выше емкость, тем дольше от одной зарядки может работать квадрокоптер.
При последовательном включении аккумуляторных элементов суммируется напряжение, при параллельном — суммируется ток. Если ячейки включатся только последовательно (без параллельного включения), то надпись 1P может исключаться. Конечно, чем больше емкость, тем больше энергии сможет отдать аккумулятор, и тем больше пролетит квадрокоптер. Однако и тем больше весит батарея, что совершенно не нужно. Батарея, которая весит 170 грамм, для коптера является существенным весом.
Аккумулятор, конечно же, не может обеспечивать совершенно любую силу тока. Одной из самых важных характеристик аккумулятора является максимальный разрядный ток или токоотдача. Токоотдача указывается на аккумуляторах в единицах «С».1С = емкость аккумулятора в мАч (C– Capacity, то есть ёмкость). Чтобы узнать максимальный разрядный ток (токоотдачу) в амперах необходимо значение в единицах С умножить на емкость аккумулятора. Например, у данного аккумулятора токоотдача 70 С. Значит, максимальная сила тока с таким аккумулятором составляет 91 ампер. Однако указанные на аккумуляторах параметры далеко не всегда соответствуют действительности. Поэтому следует применять только проверенные аккумуляторы, чтобы не получить падение в середине полета.
Моторы квадрокоптера требуют большой силы тока, когда работают на полной мощности, поэтому и токоотдача (единицы С) аккумулятора должна быть как можно больше. Рекомендуется выбирать батареи таким образом, чтобы расчетный рабочий ток не превышал 70 процентов от номинальной токоотдачи батареи.
Однако, применение аккумуляторов имеет существенные недостатки, которые становятся все более очевидными по мере расширения областей применения беспилотников. Главные проблемы включают ограниченный срок службы (обычно 200-300 циклов зарядки), чувствительность к температурным условиям и риск возгорания при механических повреждениях или неправильной эксплуатации
Двигатели внутреннегосгорания. Широкое распространение получили и двигатели внутреннего сгорания (ДВС). По сравнению с электродвигателем, ДВС способен обеспечивать большую длительность полета и дальность полезной нагрузки, благодаря более высокой мощности и топливной экономичности. Однако электродвигатели остаются предпочтительными для малых БВС вследствие наличия таких ключевых характеристик, как:
− низкие тепловые и акустические характеристики (сложнее обнаружить тепловым радаром);
− хорошо развитые электронные системы управления;
− низкая стоимость;
− более высокая надёжность и меньшая взрывоопасность.
Газотурбинные двигатели, используемые в силовых установках летательных аппаратов, демонстрируют хорошие характеристики только в диапазоне более 100 л. с. и не подходят для малых БВС
Сейчас электродвигатели являются самым распространённым решением для малых БВС, источниками энергии для них являются электрические аккумуляторы, фотоэлектрические модули, топливные элементы
Гибридные варианты электроснабжения БВС требуют установки систем управления энергопотреблением.
По мере перехода к гибридным архитектурам беспилотных воздушных средств и появления территориально распределенной зарядной инфраструктуры повышается значимость управления энергопотреблением контроллеры и инверторы, которые дополнительно увеличивают массу и сложность устройства.
В ближайшем будущем станут доступны более совершенные виды батарей, с более высокой плотностью энергии. Так, проводятся интенсивные исследовательские работы на литий-тионил-хлоридных батареях (Li-SOCl2), обладающих вдвое большей удельной массой, чем Li-Po.
Направление развития современных силовых установок БПЛА – использование гибридных систем, состоящих из батарей и топливных элементов. Обычно это комбинация батарей с высокой удельной энергией и водородных топливных элементов. Водородное топливо допустимо хранить на борту беспилотного летательного аппарата в баллонах под давлением или в виде химических соединений.
Последние разработки в области литий-полимерных аккумуляторов включают использование кремниевых анодов, которые теоретически могут увеличить энергоемкость на 30-40%, а также внедрение систем активного охлаждения для работы в экстремальных условиях.
Более эффективных решений дают разработки в некоторых несколько многообещающих направлениях.
Литий-серные (Li-S) аккумуляторы теоретически могут предложить удельную энергоемкость в 2-3 раза выше, чем у LiPo, при меньшей массе и стоимости. Однако проблемы с циклической стабильностью и быстрой деградацией электродов пока препятствуют их коммерческому применению в дронах.
Другое перспективное направление — твердотельные батареи, которые обещают повышенную безопасность, более широкий температурный диапазон работы и увеличенный срок службы.
Особый интерес представляют гибридные системы, сочетающие различные типы накопителей энергии. Например, комбинация литиевых аккумуляторов с суперконденсаторами позволяет эффективно компенсировать пиковые нагрузки при маневрах дрона, продлевая общий срок службы батареи.
Вертолетные и конвертопланные БПЛА начинают оснащать компактными турбогенераторами, работающими на жидком топливе, которые могут работать в качестве бортовых зарядных устройств для основной батареи.
Для промышленных дронов, работающих на открытых пространствах, все чаще применяют гибкие солнечные панели с эффективностью преобразования свыше 30%, которые могут увеличивать продолжительность полета на 20-40%.
Особую категорию составляют экспериментальные проекты, исследующие принципиально новые подходы к энергоснабжению дронов. Среди них — системы сбора энергии из окружающей среды (вибрации, перепады температур, радиоволны), топливные элементы на водороде, и даже концепции беспроводной передачи энергии от наземных станций или спутников.
Современные системы управления питанием дронов превратились в сложные программно-аппаратные комплексы, которые динамически распределяют энергию между всеми подсистемами аппарата. Используя данные о состоянии батареи, параметрах полета и поставленной задаче, эти системы могут принимать решения о перераспределении мощности между двигателями, полезной нагрузкой и бортовой электроникой.
Машинное обучение позволяет прогнозировать расход энергии на различных этапах миссии и заранее оптимизировать маршрут для минимизации энергопотребления.
Развитие технологий быстрой зарядки (вплоть до 10-15 минут для полного восстановления емкости) и появление стандартизированных съемных аккумуляторных блоков упрощают эксплуатацию коммерческих дронов. В то же время, сохраняется потребность в фундаментальных исследованиях новых электрохимических процессов и материалов, которые могли бы обеспечить качественный скачок в удельной энергоемкости и безопасности источников питания.
В настоящее время разработана система беспроводной зарядки в воздухе, которая может заряжать сразу несколько дронов. Создание достаточного количества этих станций может привести к появлению целой армии беспилотников, Зарядное устройство выглядит достаточно просто: это шестиугольная рама из проводов на опорах диаметром примерно 10 метров. При включении оно создает электромагнитное поле в воздухе в площади станции. Дрон, оснащенный специальными антеннами, заряжается, пролетая в зону действия энергетического облака. Такое зарядное устройство может передать до 12 киловатт мощности при КПД около 80 процентов – восьми минут зарядки будет вполне достаточно для того, чтобы дрон продержался в воздухе около получаса.
Ключевым направлением развития станет не только совершенствование самих источников энергии, но и создание комплексных энергетических экосистем, включающих интеллектуальные системы распределения, зарядную инфраструктуру и технологии рекуперации энергии.
Газотурбинные двигатели, используемые в силовых установках летательных аппаратов, демонстрируют хорошие характеристики только в диапазоне более 100 л. с. и не подходят для малых БВС Важную роль в развитии энергоснабжения БВС будут играть не только бортовые системы, но и зарядная инфраструктура для аккумуляторных дронов, являющихся в настоящее время наиболее распространённым их типом. Соответственно, возникает проблематика строительства такой инфраструктуры и её интеграции в электрические сети, которая вызовет дополнительную нагрузку на них. В ряде случаев зарядные станции могут работать автономно при помощи ВИЭ (например, установленных на них фотоэлектрических систем) и накопителей энергии. Отдельной проблемой является пространственное расположение зарядных станций с учётом особенностей городской и сельской местности. В случае зарядки методом подкачки возникает необходимость расположения зарядных станций вдоль траектории движения БВС, т. е. с достаточно высокой частотой распределения на местности. Это связано с тем, что аппараты могут запускаться по самым разным маршрутам. Разрабатываются гибридными установками, включающими суперконденсаторы. Суперконденсаторы имеют невысокую стоимость установки и обслуживания, более широкий разброс температур, при которых они могут функционировать, а также устойчивы к перегрузкам и не склонны к нестабильности напряжения в полёте.
Фотоэлектрические модули. Установка модулей солнечной генерации непосредственно на летательные аппараты позволяет энергии солнца обеспечивать полёт в течение периодов максимальной солнечной активности, а аккумуляторы с накопленной в эти периоды энергией – в отсутствие инсоляции. Такая система увеличивает время полёта. Однако, она имеет такие ограничения, как:
-сложность системы, приобретаемая вследствие необходимости установки на БВС преобразователей, контроллеров, сенсоров и иного оборудования;
-непостоянный характер выработки энергии от солнечной радиации
-непригодность для малых БВС, во многом из-за потребности в увеличении размеров крыла для того, чтобы на них можно было расположить достаточное количество фотоэлектрических модулей.
Топливные элементы. Беспилотные воздушные суда, использующие водородные топливные элементы, могут работать в течение нескольких часов вместо нескольких минут у аккумуляторных БВС. Топливные элементы превосходят батареи по удельной мощности, поэтому их следует рассматривать как предпочтительное решение для обеспечения большей «выносливости» при ограниченной массе. Кроме того, процесс дозаправки осуществляется практически мгновенно, что снимает проблему простаивания БВС, а энергопотери при передаче энергии сокращаются.
При применении топливных элементов существует несколько негативных факторов, которые необходимо учитывать:
-водород имеет плотность всего 0,089 кг/м3 при стандартной температуре и давлении –соответственно, чтобы БВС мог перевозить достаточное количество топлива, баки должны быть очень громоздкими;
-нестабильность напряжения при возникновении резких изменений в мощности;
-более низкая эффективность (60%), чем у литий-ионных батарей (90%);
-необходимость установки дополнительного оборудования, усложняющая систему.
3.5. Управление полетом БПЛА
Полётный контроллер — это «мозг» любой мультироторной системы. Удерживать мультироторную машину в воздухе в заданном положении довольно сложная задача — требуется очень быстро реагировать на стремительно изменяющееся силы, действующие на воздушный аппарат, и молниеносно принимать решения какой мотор ускорить, а какой притормозить. Этим занимается полетный контроллер.
Полетный контроллер – электронное устройство, представляющее из себя вычислительную систему, работающую по сложным алгоритмам, и управляющая полетом беспилотного летательного аппарата. Если несколько упростить его задачи, то полетный контроллер отвечает за передачу всех команд, которые пилот передает на борт дрона. В задачи контроллера входит интерпретация входящих данных от ресивера (приемника), модуля GPS, монитора батареи и бортовых датчиков. Кроме этого, полетный контроллер взаимодействует с электронными регуляторами хода и тем самым следит за работой двигателя и регулировку скорости, что является частью задач по управлению дроном. Но это, разумеется, далеко не все. Любые команды – запуск и работа камеры, управление режимом автопилота и другие автономные функции, – все они направляются полетным контроллером.
Команды, принятые приемником, поступают в полетный контроллер в виде широтно-импульсного сигнала. Здесь они с учетом текущей навигационной информации (получаемой в самом полетном контроллере от встроенных микросистемных гироскопов и акселерометров), а также с учетом сигналов с модуля GPS (опционально) преобразуются в широтно-импульсные сигналы управления моторами, которые подаются на контроллеры частоты вращения двигателей (т.н. ESC – Engine Speed Control).
Он имеет множество входов и выходов для получения управляющего сигнала, его обработки и передачи различным исполнительным устройствам, рис. 3.27.

Рис.3.27. Полетный контроллер
На полетном контроллере установлены датчики, которые регистрируют информацию о малейших изменениях углов ориентации квадрокоптера. Эти сведения передаются в сердце полётного контроллера — микропроцессор.
Микропроцессор. Производит сложные математические расчеты и определяет, с какой скоростью сейчас следует крутится каждому из моторов. Чем быстрее процессор справляется с вычислениями, тем чаще он считывает данные о текущем положении квадрокоптера с датчиков, а значит быстрее реагирует на малейшее их изменения.
Полетные контроллеры квадрокоптеров строятся на базе микропроцессоров STM32. На самом процессоре после обозначения STM32 можно прочесть, к какому поколению он относится. Обозначение «F1» имеет скорость 72 мегагерца. Это самый медленный процессор. Данный процессор сможет выполнять максимум 2000 расчетов в секунду. Тысячи обозначим буквой «К» = 2К расчетов в секунду. Следующий процессор в линейке — «F3». Он будет делать 4К расчетов в секунду. Микропроцессор «F4» имеет скорость 168 мегагерц и способен обеспечить более 8К расчетов за одну секунду. Процессор F7 имеет скорость 216 мегагерц — выдает 32 К.
Процессор получает информацию от следующих датчиков:
-акселерометр — измеряет ускорение в любом направлении;
-гироскоп — измеряет вращение;
-барометр — измеряет высоту;
-магнитометр — корректирует информацию, полученную с акселерометра и гироскопа, так как фиксирует перемещение дрона относительно магнитного поля земли;
-GPS-приемник — необходим для возврата дрона в точку взлета, а также ограничивает возможность полета над запрещенными объектами.
Назначение модулей ESC – преобразование управляющих широтно-импульсных сигналов в синусоидальные трехфазные напряжения для обмоток бесколлекторных электромоторов.
Регуляторы оборотов. ESC —electronic speed controller, переводится как электронный контроллер скорости. В русскоязычном сообществе принято называть их как «регуляторы оборотов», в простонародье «регуляторы».
Принцип действия ESC. Контроллер полета посылает данные регулятору оборотов, что нужно прибавить или убавить скорость вращения пропеллеров. Но мотору квадрокоптера нельзя просто подать напряжение, так как он трехфазный и требуется попеременно подавать напряжение на определенные участки обмотки. Этим и занимается регулятор оборотов (ESC), рис. 3.28.

Рис. 3.28. Схема ESC
В зависимости от требуемой скорости вращения регулятор будет в строго заданной последовательности с определенной скоростью подавать на обмотки двигателя напряжение, что будет вызывать вращение ротора. Обмотки бесколлекторного мотора соединены между собой по специальной схеме. Имеют три вывода. К электронному регулятору нужно подключить эти выводы обмоток мотора, а также подвести питание от аккумулятора.
Сигнальный вывод ESC. Выбирая регулятор для квадрокоптера, вы столкнетесь со следующими параметрами.
Максимальный ток. Это та сила тока, которую выходные транзисторы контроллера могут держать продолжительное время.
Иногда указывают величину кратковременного пикового тока, допустимого в течение нескольких секунд. Также на регуляторе указывается максимальное рабочее напряжение. Важно убедиться, что регулятор рассчитан на то количество банок, которые содержатся в вашем аккумуляторе.
Чем быстрее передаются в регулятор сведения о скорости вращения мотора, тем выше реакция силовой установки на расчеты полетного контроллера и тем лучше квадрокоптер ведет себя в воздухе. Поэтому постоянно разрабатываются все новые и новые протоколы, позволяющие все быстрее и быстрее доставлять данные в регулятор.
Самый медленный и поддерживаемый всеми регуляторами протокол обозначается буквами PWM или если по-русски ШИМ, широтно-импульсная модуляция. Виды и скорость протоколов передачи данных в ESC. В настоящее время повсеместно внедряется принципиально новый тип протокола, цифровой, который называется DSHOT. Цифровой протокол отличается более точной и помехоустойчивой передачей данных и высоким разрешением. Для выполнения команд пилота к полетному контроллеру подключается радиоприемник. Он, в свою очередь, принимает сигналы от пульта управления и передает их на полетный контроллер, рис.3.29.
Для усиления сигнала могут использоваться антенны. Радиоприемник работает на нескольких каналах для более устойчивого сигнала и повышения дальности.
Микросхемный модуль OSD (On-Screen Display) передает информацию о состоянии квадрокоптера на пульт управления или поверх видеосигнала с камеры. Он отображает информацию: заряд аккумулятора; -потребление тока; высота; скорость; скороподъемность; GPS-координаты; уровень сигнала.

Рис.3.29. Схема приема и передачи сигналов на полетный контроллер
На полётном контроллере любого мультикоптера установлен чип MPU, который объединяет в себе трёхосевой гироскоп, трёхосевой акселерометр и цифровой процессор обработки движения (DMP), который способен обрабатывать комплексные алгоритмы по 9 осям. Элементы с motion fusion алгоритмами по 9 осям обладают доступом к внешним магнитометрам или другим датчикам через дополнительную I2C шину, позволяя устройству собирать полный набор данных датчиков без вмешательства системного процессора. Проще говоря, чип MPU является основным элементом, участвующем в формировании полёта квадрокоптера.
Также, наряду с чипом MPU, на полётном контроллере установлен ещё один не менее важный чип — STMF4, который является командным центром для всех систем полётного контроллера. В нём хранится прошивка — программная часть полётного контроллера.
К функциям полётного контроллера относится:
-стабилизация аппарата в воздухе;
-удержание высоты при помощи барометрического высотомера или иных датчиков;
-удержании позиции при помощи GPS/ГЛОНАСС;
-автоматический полёт по заданным заранее точкам -(опционально);
-передача на землю текущих параметров полёта с помощью радиомодема или Bluetooth (опционально);
-обеспечение безопасности полёта (возврат в точку взлёта при потере сигнала, авто посадка);
-остановка перед препятствием (для мультикоптеров) или облет препятствий (для самолётов) при наличии датчиков;
-подключение дополнительной периферии: OSD, светодиодной индикации и т.д.
Поскольку каждый индивидуальный ESC питается от основной батареи, основной разъем АКБ должен быть как-то разделен на четыре ESC. Для этого используется плата распределения питания или жгут распределения питания.
Плата распределения питания. Плата имеет специальные площадки-контакты силовой линии питания, к которым припаиваются провода от регуляторов оборотов. Внутри этой платы все плюсовые и все минусовые контакты соединены между собой. И выведены в отдельное место для подсоединения разъёма аккумулятора, рис. 3.30.

Рис.3.30. Плата распределения питания
Получается аккуратный монтаж без всяких скруток и навесных спаек. Часто полетный контроллер уже имеет места для подключения ESC.
Дополнительно может быть установлен датчик расстояния, рис. 3.31. В отличие от других он выведен наружу корпуса из-за особенностей работы. Принцип работы похож на ориентацию в пространстве летучих мышей: одно отверстие испускает высокочастотный звук, а другое принимает его. Датчик фиксирует время, необходимое для возвращения звука, после чего происходит расчет расстояния до ближайших объектов.

Рис. 3.31. Датчик расстояния
Вместе с ними могут использоваться лидары. Принцип работы аналогичен, только вместо звуковой волны лидар использует лазер, и помимо определения расстояния, может строить более подробную карту окружающего пространства. Эти устройства необходимы для точного управления и позиционирования квадрокоптера в пространстве. Они могут быть встроены в плату или подключаться отдельно. При этом корректная работа возможна только при совокупности получаемой информации.
На новых моделях квадрокоптеров этот модуль встроен в плату, но в старых моделях есть возможность подключить его отдельно.
Важным модулем является камера с видеопередатчиком. Видео передатчик отвечает за отправку сигнала. Аналоговая передача осуществляется по 5,8 Ггц каналу. Это уменьшает задержку и дает возможность использования FPV-режима, но у данного стандарта есть недостатки в виде низкого разрешения (максимум — 480р) и наличия помех. Они увеличиваются с расстоянием, но сигнал прерываться не будет.
Wi-Fi передача данных распространена на недорогих дронах и может конфликтовать с сигналом от пульта, так как они находятся на одних частотах (2,4 и 5 Ггц). Качество видео при этом будет высоким, однако, заметная задержка, которая увеличивается с расстоянием, сильно усложняет возможность полета в режиме FPV. При этом можно передавать видеосигнал на экран смартфона.
Напряжение. На питание электронных компонентов квадрокоптера требуется подать определенное напряжение. Например, для работы электроники полётного контроллера требуется 5 вольт. Напряжение аккумулятора, конечно же, больше. Поэтому необходимо какое-то устройство для понижения бортового напряжения до нужного стабильного значения. Такое устройство называется регулятор напряжения («UBEC», порусски Бек).
Инерциальный измерительный блок (IMU) включает трёхосевой акселерометр, трёхосевой гироскоп и трёхосевой магнитометр, обеспечивающий в общей сложности 9 осей измерения. Принцип работы интегрального гироскопа. Гироскоп (от греч. «gyros» – круг и «skopeo» – смотрю, наблюдаю) – это устройство, которое способно реагировать на изменение углов ориентации объекта и определять его положение в пространстве. Чувствительным элементом интегрального гироскопа являются две подвижные массы (грузики), которые находятся в непрерывном движении на упругом подвесе в противоположенных направлениях, рис.3.32.

Рис.3.32 Устройство интегрального гироскопа
Источником колебаний подвижной массы является гребенчатые электростатические двигатели. Подвижная масса, вместе с электродами, расположенная на подложке, образуют конденсаторы, входящие в состав дифференциальной схемы, вырабатывающей сигнал, пропорциональный разности емкостей конденсатора. Линейное ускорение одинаково воздействует на обе подвижные массы и подложку, поэтому сигнал на выходе дифференциальной схемы не появляется. Как только произойдет изменение угловой скорости относительно оси вращения, то на подвижные массы начинает действовать сила Кориолиса, отклоняя подвижные массы в противоположных направлениях.