Полная версия
Современные беспилотные летающие аппараты

Юрий Почанин
Современные беспилотные летающие аппараты
56
52.ВВЕДЕНИЕ
Беспилотная авиация представляет собой быстро развивающуюся область, которая охватывает различные типы самолетов и вертолетов, управляемых дистанционно или автономно. Она находит применение в различных отраслях, таких как сельское хозяйство, строительство, логистика, наблюдение и даже в военных целях.
Беспилотная авиационная система (БАС) — это целый набор технологий: сам аппарат, пульт управления, спутниковая связь, программное обеспечение для планирования маршрутов и обработки данных.
Беспилотный летательный аппарат (БПЛА), входящий в состав БАС — это летающий робот, которому не нужен пилот на борту. Он может подчиняться командам оператора с земли или следовать заранее заданному маршруту, как запрограммированный аппарат
Современные беспилотные авиационные системы имеют множество преимуществ перед традиционными летательными аппаратами. Они обладают более высокой маневренностью, могут летать на меньших высотах и в труднодоступных местах, а также могут использоваться для различных задач. БАС гораздо дешевле пилотируемых самолетов и вертолетов. Отсутствие пилота позволяет исключить бортовые системы жизнеобеспечения, уменьшить массу и габариты системы, а также увеличить диапазон допустимых перегрузок и влияющих факторов. Большое значение имеет и фактор безопасности- потери беспилотных аппаратов не ведут к потери пилотов. Диапазон существующих и разрабатываемых аппаратов очень широк: от микро- и мини- БПЛА до тяжелых многотонных аппаратов, способных выполнять сверхдальние и сверхвысотные полеты длительностью в несколько месяцев. Стремительно расширяется военная область и сферы гражданского применения. Взрывной рост количества разработок связано с серьезными технологическими успехами в разных областях:
-появление новых легких и прочных материалов, особенно композитных;
-быстрое развитие микроэлектронной компонентной базы: микроконтроллеров, микросистемных навигационных датчиков, приемопередатчиков радиосигналов, различных СВЧ-устройств, микроэлектронных драйверов сильноточных потребителей, миниатюрных видеокамер и т.д.;
-появление и быстрое развитие высокоэффективных возобновляемых источников питания на основе литий-полимерных аккумуляторов и топливных элементов и др.;
-разработки в области высокоресурсных бесколлекторных электродвигателей, а также реактивных и поршневых двигателей;
-развитие спутниковых систем глобального позиционирования;
-общее развитие вычислительной техники, включая появление специальных операционных систем, интерфейсов, математического и алгоритмического обеспечения;
-применение искусственного интеллекта (ИИ).
Разработками в области беспилотной авиационной техники занимаются в разных странах как крупные фирмы, так и небольшие специализированные предприятия.
В современном мире беспилотные летательные аппараты становятся все более популярными и востребованными. Однако, одной из основных проблем, с которой сталкиваются разработчики этих систем, является ограниченность энергетических ресурсов. Традиционные источники энергии, такие как батареи или генераторы, имеют ограниченную емкость и требуют регулярной замены или заправки. Это ограничивает время полета и дальность БПЛА, что сильно ограничивает их эффективность и применимость в различных сферах. В связи с этим, использование солнечной энергии для питания БПЛА становится все более актуальным и перспективным. Разработка БПЛА самолетного типа с питанием от солнечных батарей представляет собой одну из перспективных областей и требует учета различных факторов, таких как энергетическая эффективность, автономность, функциональность и легкость конструкции.
Лидерство в разработке и производстве БПЛА сейчас уверенно удерживают США . Но в последние несколько лет на рынке БПЛА возросла активность европейских фирм. Сейчас они занимаются разработкой и серийным производством более чем 200 моделей БПЛА. По этому показателю европейцы даже немного превзошли американцев (правда, следует учесть, что некоторые европейские БПЛА являются доработанными американскими изделиями). В Европе создаются практически все типы современных БПЛА (от микро‑БПЛА до ББС, но не все они выпускаются серийно). Многие европейские разработки последних лет являются сильными конкурентами на мировом рынке и в экспортном плане начинают вытеснять американские БПЛА. Следует, отметить, что по уровню используемых технологий европейские БПЛА несколько отстают от американских, зато с точки зрения стоимости они более привлекательны для покупателей.
По оценкам специалистов "Рособоронэкспорта", ведущее положение по объему производства и широте ассортимента предлагаемой беспилотной авиатехники занимают США – на их долю приходится порядка 32,5 %. В тройке лидеров также Израиль и Франция. Далее следует Великобритания с 5,6 %. Россия, где производится 5,5 % беспилотников, – на пятом месте. Замыкают десятку Италия, Испания, Германия, Иран и Китай, рис.1. В последние годы стремительно развивают свой потенциал в этом направлении Украина, Индия, Южная Корея, Финляндия, Иордания, Швеция, Тунис, Иран, Сингапур.

Рис.1. Десятка ведущих стран – разработчиков и производителей систем БПЛА "
Современные технологии и материалы позволяют создавать все более совершенные и эффективные БАС, что открывает новые возможности для их применения и развития. Основным их преимуществом является существенно меньшая стоимость их создания и эксплуатации при условии равной эффективности выполнения поставленных задач.
ГЛАВА 1 КЛАССИФИКАЦИЯ БЕСПИЛОТНЫХ ЛЕТАЮЩИХ АППАРАТОВ
Изучение мирового парка беспилотных летающих аппаратов показывает, что сегодня существует весьма насыщенный рынок предложений подобной техники. Однако основная доля мирового парка приходится на малые и легкие БАС. Это свидетельствует о том, что развитие миниатюризации радиоэлектронной техники позволило сделать БАС более легкими и компактными. Несмотря на относительную молодость и все многообразие, она уже имеет сложившиющую систему классификации, которая во многом, упирается на традиционную пилотируемую авиацию, рис.1.1. В связи с этим, из огромного перечня квалификационных вариантов БПЛА, необходимо выбрать тот, который в наибольшей степени обеспечит в конечном итоге, требуемый экономический эффект.
Беспилотные авиационные системы представляет собой системы двойной направленности: для гражданских целей и военного назначения. Беспилотная авиационная система состоит из трех основных частей: беспилотный летательный аппарат, наземный комплекс и персонал.
Принцип работы беспилотника основан на комбинации сенсорных систем, автопилота и программного обеспечения. Сенсоры, такие, как камеры, радары, лидары и система навигации, собирают информацию об окружающей среде и положении аппарата. Эти данные передаются в автопилот, который обрабатывает информацию и принимает решения о дальнейшем движении и поведении беспилотника, управляя вращением двигателей и отклонением аппарата от заданной траектории.

Рис. 1.1. Состав беспилотной авиационной системы
Принцип и методы управления беспилотником могут отличаться в зависимости от его конкретного назначения. Некоторые беспилотники могут быть полностью автономными и способны выполнять задачи самостоятельно без участия человека. Другие дроны могут быть дистанционно управляемыми, где оператор на земле управляет аппаратом с помощью пульта управления или компьютерного интерфейса. Большинство современных аппаратов, как гражданских, так и военных, могут управляться и оператором, и летать самостоятельно. БПЛА можно разделить на классы по различным признакам: дальности полета, грузоподъемности, радиусу действия, взлетной массе и т.д., но, пожалуй, наиболее удачной является классификация по взлетной массе, которая позволяет точней и удобней разделить БПЛА на классы
Беспилотная авиационная система (БАС) включает в себя не только авиационный комплекс, но и дополнительные компоненты, формирующие связи различного вида между его элементами, рис. 1.2.

Рис. 1.2. Обобщенная структура БАС
Прежде всего это технический персонал и необходимое программное обеспечение (ПО). Еще один важный элемент БАС – средства интеграции с другими системами, позволяющие объединять несколько БАК в систему с единым управлением. Также в систему следует включить совокупность необходимой технической и регламентирующей документации.
Из анализа данных по мировому парку беспилотной техники, что в качестве основного классификационного признака целесообразно использовать уровень функциональной самостоятельности беспилотного летательного аппарата (БПЛА), входящего в состав БАС. Этот уровень полностью определяется интеллектуальным совершенством его бортового комплекса. По данному критерию сегодня выделяется четыре группы БАС, рис. 1.3.

Рис.1.3. Классификация БАС военного назначения по основным параметрам
1. Дистанционно пилотируемый ЛА (ДПЛА) – непрерывно управляющийся оператором, находящимся вне ЛА. В БАС (ДПЛА) все функции управления параметрами и функциональным поведением ЛА отведены оператору.
2. Беспилотный автоматический ЛА (БПЛА), выполняющий свои функции в автоматическом режиме без связи с оператором, по заложенным алгоритмам и программах функционирования. В БАС все функции управления реализует программный комплекс с базой данных, используемые в системе автоматического управления (САУ).
3. Дистанционно управляемый ЛА (ДУЛА) – это беспилотный автоматический ЛА, в управлении которого допускается эпизодическое вмешательство оператора в случае необходимости для перехода полетного задания или в аварийных условиях.
4. Дистанционно управляемая авиационная система (ДУАС) -это система, оснащенная интеллектуальной составляющей и САУ, позволяющие самостоятельно формировать алгоритмы выполнения поставленных задач. Система также имеет способность организации автономного взаимодействия группы из нескольких БПЛА. Причем оператор может взаимодействовать лишь с одним из БПЛА в группе, который уже на основе полученного задания выдает целеуказания и определенного поведения всей группы. Вмешательство оператора в действия такой системы заключается в постановке новой задачи.
Поскольку такие аппараты выполняют запрограммированное полётное задание, то им необходимо иметь встроенный микропроцессор при этом желательно оснащённый нейросетевыми алгоритмами. Другим условием, без которого невозможно самостоятельное ориентирование БПЛА в полёте, является наличие бортового навигационного оборудования. Чаще всего его роль выполняет одно или двух антенный ГНСС приёмник, обеспечивающий получение спутникового сигнала с уточнением координат по RTK (Real Time Kinematic). Однако на случай потери связи со спутником, рекомендуется также включить в состав навигационного комплекса инерциальный измерительный модуль (IMU), который позволяет поддерживать точность курса в автономном режиме. Примером такой интегрированной навигационной системы может служить BW-GI100/200. Подобные системы внедряются в некоторых странах. Отметим, что каждые беспилотники из приведенных типов классификации по признакам автономности соответствует своей группе сложности решаемых задач.
В качестве основных характеристик БАС используются эксплуатационный диапазон высот и скоростей БПЛА. Диапазон высот и скоростей обычно называют область, в которой БПЛА способен совершать прямолинейный горизонтальный полет с постоянной скоростью без внешних возмущений.
Вторым важным параметром, характеризующим БПЛА и БАС на его основе, является максимальная скорость полета. Подавляющая доля мирового парка имеет максимальную скорость в диапазоне 125 – 250 км/час. Создание скоростных БАС представляет собой более сложный технологический процесс. С функциональной скоростью связана и результативность БАС, выражающаяся в виде вероятности выполнения задания.
Еще один важный показатель БПЛА его взлетная энерговооруженность Статистика показывает однозначную связь этого параметра с максимальной продолжительностью полета. В районах с относительно высоким уровнем ветровой нагрузки (более 8 м/с) применять БПЛА с энерговооруженностью менее 0,2 – 0,25 кВт/кг проблематично, так как невозможно выдерживать заданные параметры полета.
Не менее важным показателем является величина полезной нагрузки Е=Мпн/Мо, где Мо- стартовая масса, М пн – масса полезной нагрузки БПЛА. Для оптимизации БАС необходимо создание комплексов полезной нагрузки для каждого класса размерности БПЛА.
Такой подход позволяет объединить аппараты, схожие по техническим решениям, выполняемым задачам, находящиеся в достаточно узком диапазоне других технических характеристик.
ГЛАВА 2. ХАРАКТЕРИСТИКИ БЕСПИЛОТНОГО ЛЕТАЮЩЕГО АППАРАТА
В настоящее время Международной ассоциацией по беспилотным системам AUVSI (Association for Unmanned Vehicle Systems International) разработана методика классификации БПЛА, которая помимо систем управления БПЛА, конструкционных особенностей учитывает множество лётных характеристик, таких как взлетная масса, дальность, высота и продолжительность полета, размеры аппарата и т.д.
2.1. Основные лётные характеристики
Из таблицы 2.1, в которой представлены взлетная масса и дальность действия БПЛА можно выделить четыре основные группы беспилотников (мини БПЛА, лёгкие БПЛА, средние и тяжёлые БПЛА).
Таблица 2.1. Взлетная масса и дальность действия
Категория
Взлетная
масса, кг
Дальность действия, км
Микро и мини БПЛА ближнего действия
0 - 5
25 -40
Легкие БПЛА малого радиуса действия
5 - 50
10 - 70
Легкие БПЛА среднего радиуса действия
50 - 100
70 – 150 (250)
Средние БПЛА
100 - 300
150 - 1000
Средне – тяжелые БПЛА
300 - 500
70 - 300
Тяжелые БПЛА среднего радиуса действия
500 - 1500
70 - 300
Тяжелые БПЛА большой продолжительности
полета
Более 1500
1500
Беспилотные боевые самолеты
Более 500
1500
Последние две категории БПЛА подразумевают специальное применение, поэтому их разработка и производство является почти исключительной прерогативой крупных авиастроительных корпораций, а широкому кругу пользователей более известна первая и вторая категории дронов.
Однако, наиболее перспективной и бурно развивающейся на данный момент категорией считаются лёгкие БПЛА, поскольку потенциальная сфера их применения очень широка (от аэрофотосъёмки и картографирования до перевозки различных грузов в труднодоступной местности, что обходится дешевле использования пилотируемых средств).
Виды дронов по способу управления.
1. Управление по Wi-Fi. Осуществляется с помощью приложения на смартфоне и специального передатчика сигнала внутри квадрокоптера. Чаще используется на бюджетных моделях коптеров. Дальность полета в этом случае не превышает 100-150 м, т.к. радиус действия беспроводной сети небольшой. Самый большой минус технологии – возможны задержки картинки при удалении дрона от пилота, что неудобно при трансляции видео в режиме реального времени. Такие модели оптимальны для съемки селфи, т.к. при этом не требуется большого расстояния между камерой и пользователем. Управление производится с помощью сенсорных кнопок, имитирующих физические стики. Также смартфон удобен для регулировки угла поворота камеры, настройки параметров съемки, просмотра и монтажа уже отснятого материала. Дополнительный плюс – не нужно носить с собой габаритный пульт дистанционного управления.
2. Управление по радиоканалу. Позволяет увеличить дальность полета квадрокоптера до нескольких километров и все это время транслировать видео с камеры на экран пульта или смартфона. Частота, на которой чаще всего работают дроны – 2,4 и 5,8 ГГц. Диапазон 2,4 ГГц менее популярен, т.к. картинка здесь более подвержена шумам и размытию (на этой частоте работает много других приборов, создающих помехи для сигнала). Трансляция на частоте 5,8 ГГц происходит с минимальной задержкой картинки, но цена на устройства с этим диапазоном существенно выше. При использовании радиосигнала необходима полноценная аппаратура в виде пульта управления с мощным передатчиком, стиками и кнопками. Возможно также сочетание пульта с телефоном: большинство коптеров имеет соответствующие гнезда и крепления, позволяющие управлять полетом с помощью пульта, а изображение выводить на экран мобильного устройства.
3. По выводу изображения с камеры. Вывод картинки с камеры также может происходить разными путями.
3.1. FPV. Модели с данной функцией (First Person View – с англ. «вид от первого лица») выводят на экран видео шлема, очков или смартфона все, что снимает камера, установленная в коптере, в режиме реального времени. Трансляция изображения на экран шлема или очков позволяет увидеть то, что «видит» дрон и буквально почувствовать себя в воздухе. Также функция необходима при дальних полетах, т.к. на расстоянии свыше 100 метров дрон уже трудно различим глазами и направлять его придется именно по видео. Применяют технологию не только для развлечения, но и для решения профессиональных задач: осмотра труднодоступных объектов, охраны территории, сельского хозяйства.
3.2. На экран телефона или пульта. Также изображение с камеры может выводиться на экран пульта управления или смартфона. Во втором случае необходимо установить на телефон специальное приложение, рекомендованное производителем дрона.
Самые простые модели не транслируют изображение во время полета, а просто записывают его на карту памяти. Посмотреть фото и видео можно будет после того, как коптер приземлится.
3.3. Конструкция лётной системы БПЛА. Если прибегнуть к классификации БПЛА согласно их конструкционным особенностям, то можно выделить их следующие типы:
-Аэростатические БПЛА;
-Реактивные БПЛА;
-БПЛА самолетного типа (с фиксированным крылом);
-БПЛА вертолетного типа (однороторные);
-Мультикоптерные (мульти роторные) БПЛА;
-Гибридные БПЛА (конвертопланы).
По скорости БПЛА:
-мало скоростные (от 50 до 400 км/ч),
-скоростные (от 400 км/ч до числа М*),
-сверхзвуковые (более числа М).
* М – число Маха, скорость звука в воздухе (у поверхности земли – 1224 км/ч, на высоте 11 км – 1062 км/ч.
По высоте полета БПЛА:
-предельно малых высот (от 0 до 200 м,)
-малых высот (от 200 до 1000 м),
-средних высот (от 1 до 4 км),
-больших высот (от 4 до 12 км),
-стратосферные (более 12 км).
По продолжительности полета:
-менее 2 часов,
-от 2 до 8 часов,
более 8 часов.
Беспилотные летательные аппараты отличаются по назначению, но составные части у них схожи:
-корпус (фюзеляж);
-источник энергии (аккумулятор, солнечные батареи, топливные элементы);
-двигательная установка (на основе различных типов двигателей: электрический, внутреннего сгорания, воздушно-реактивный);
-навигационная система (датчики: гироскоп, акселерометр, альтиметр, ГЛОНАСС/GPS);
-система управления (контроллер, бортовой компьютер, автопилот);
-система связи (радиоприемник, ретранслятор, радиопередатчик);
-съемочная аппаратура (камера, тепловизор);
Ряд других приборов, подбираемых под конкретный БПЛА и его задачи.
ГЛАВА 3. МУЛЬТИРОТОРНЫЕ ДРОНЫ
Мультироторные дроны - наиболее распространенные типы дронов, которые представляют собой летающую платформу с бесколлекторными моторами и пропеллерами. Так дрон с тремя моторами носит название Трикоптер, рис.3.1, с четырьмя моторами носит название – Квадракоптер, рис.3.2, с шестью – Гексакоптер, рис.3.3. с восемью – Октокоптер, рис.3.4. В полете дрон держит горизонтальное положение относительно поверхности земли и может зависать над определенным местом, перемещаться влево, вправо, вперед, назад, вверх и вниз, а также, поворачиваться вокруг своей оси. Все действия совершаются путем изменения тяги на каждом моторе. Преимущества дронов: вертикальный взлет, возможность зависать над объектом.
Обычно трикоптер движется двумя винтами вперед, а третий является хвостовым. Первые два винта имеют противоположные направления вращения и взаимно компенсируют реактивные закручивающие моменты, у хвостового же винта пары нет, поэтому для компенсации его реактивного момента ось вращения этого винта немного наклоняют в сторону, противоположную направлению закручивания. Это делают с помощью специального сервопривода и тяги, которые используются для стабилизации или управления положением аппарата по курсу.
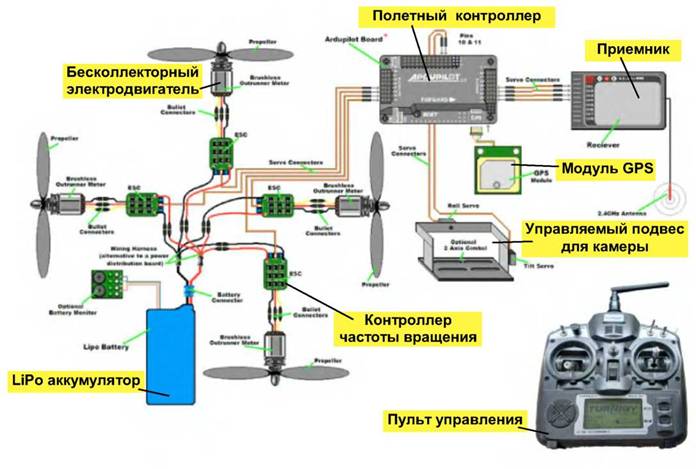
Рис. 3.1. Пример трикоптера
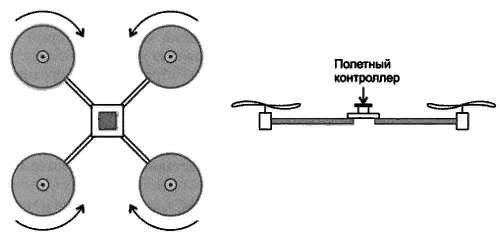
Рис.3.2. Квадрокоптер
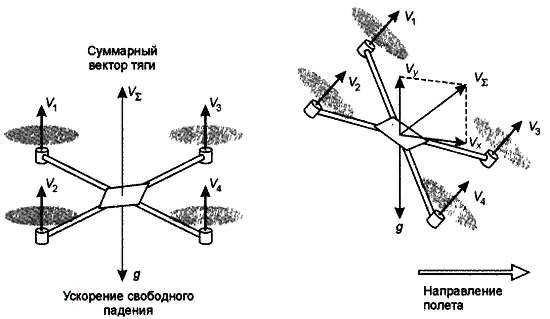
Рис. 3.3. Гексакоптер
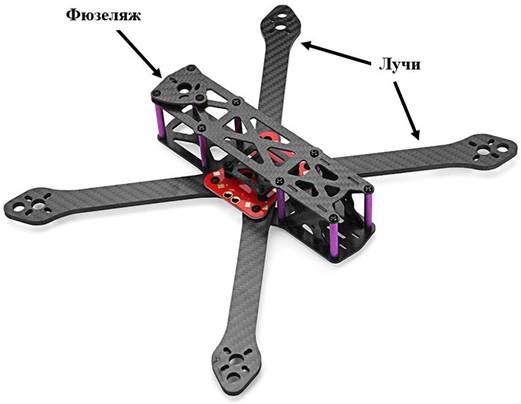
Рис.3.4. Октокоптер
Гексакоптеры и октокоптеры обладают гораздо большей грузоподъемностью по сравнению с квадрокоптерами и обычно используются для доставки грузов либо на сельхоз- работах для опыления посевов. Преимуществом большого количества роторов является и то, что такие машины способны сохранять устойчивый полет при выходе из строя одного двигателя. Такие аппараты отличаются также меньшим уровнем вибраций, что особенно важно для видеосъемки.
Хотя мультикоптерные дроны просты в изготовлении и относительно дешевы, они имеют много недостатков. Основные из них - ограниченное время полета, ограниченная грузоподъёмность и небольшая скорость. Они не подходят для крупномасштабных проектов, таких как аэрофотосъемка больших площадей. Основная проблема мультикоптеров заключается в том, что им приходится тратить огромную часть своей энергии на борьбу с гравитацией и стабилизацию аппарата в воздухе. В настоящее время большинство многороторных беспилотных летательных аппаратов способны летать всего 20-30 минут с минимальной полезной нагрузкой, такой как видеокамера.
Рассмотрим основные элементы квадрокоптера как наиболее используемого дрона. модели DJI Inspire. Пилотирование квадрокоптера осуществляется с помощью радиоуправления посредством пульта и смартфона. Предусмотрен также режим автопилота. Практически все квадрокоптеры имеют камеры для записи видео и трансляции в реальном времени.
Современный дрон состоит из множества высокотехнологичных компонентов, которые должны слаженно работать друг с другом, рис.3.5.
Типовой состав оборудования квадрокоптера для аппаратов с другим количеством роторов он аналогичен.

Рис.3.5. Состав оборудования квадрокоптера
Команды, принятые приемником, поступают в полетный контроллер в виде широтно-импульсного сигнала. Здесь они с учетом текущей навигационной информации (получаемой в самом полетном контроллере от встроенных микросистемных гироскопов и акселерометров), а также с учетом сигналов с модуля GPS (опционально) преобразуются в широтно-импульсные сигналы управления двигателями, которые подаются на контроллеры частоты вращения двигателей (т.н. ESC – Engine Speed Control). Назначение модулей ESC – преобразование управляющих широтно-импульсных сигналов в синусоидальные трехфазные напряжения для обмоток бесколлекторных электродвигателей. Типовой источник питания для бортовой сети мультикоптеров – это батарея литий-полимерных аккумуляторов. Потребляемые токи – от единиц до сотен ампер в зависимости от размеров аппарата. Основой любого аппарата являются следующие компоненты: силовая рама; двигатели и винты; системы управления и навигации; устройство управления; электронные компоненты.
Поговорим про каждый компонент отдельно на примере квадрокоптера.
3.1. Принцип работы квадрокоптера
Квадрокоптеры держатся в воздухе, управляются и перемещаются только за счет несущих пропеллеров. Классический квадрокоптер представляет собой крестообразную раму, на концах лучей которой вертикально закреплены моторы, рис. 3.6.