Полная версия
Боль в спине. За кулисами лечения и реабилитации. Часть III. Механизмы «неспецифической» боли
(Рекуперация (от лат. Recuperatio) – обратное получение, возвращение энергии, расходуемой при выполнении того или иного технологического процесса, движения, для повторного использования в том же процессе, движении).
При работе в режиме рекуперации, при решении текущей двигательной задачи с целью выйти на заданную величину напряжения включение сократительного аппарата мышцы происходит в режиме сопряжения (наложение фаз во времени) и суммации энергии растянутой соединительной ткани. Мышечное (концентрическое) сокращение синхронизировано с периодом обратного укорочения (возврата к исходной длине) упругих структур мышцы и начинается с началом первой функциональной реакции мышечного аппарата на активацию рефлекса растяжения.
Ортоградное положение и значительный эффект рекуперации энергии определяет механическую эффективность движений человека и выделяет его среди других видов млекопитающих. (К слову, именно эффективность механизма рекуперации энергии препятствует возможности быстро похудеть. Люди потребляют с пищей слишком много калорий, которые просто невозможно израсходовать при низкой двигательной активности).
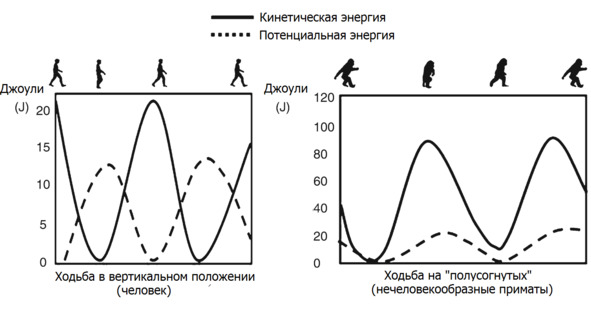
Сохранение и повторное использование механической энергии происходит за счет действия трех механизмов:
1. Перехода кинетической энергии в потенциальную энергию гравитации и обратно. Экономия энергии в диапазоне 10—25%. Зависит от типа таза и позвоночника, формы и длины костей.
2. Перехода (или передачи) механической энергии от одного звена к другому (напр. от бедра к голени) составляет от 30 до 40% от полной энергии. Зависит от соотношения длины маятников – конечности, длина туловища, масс – инерционные свойства отдельных сегментов.
3. Перехода кинетической энергии движения в потенциальную энергию деформации мышц и сухожилий и обратно. Составляет от 5 до 35%. Зависит от индивидуальной мышечной и связочной композиции. Чем выше процентное соотношение медленно сокращающихся мышечных волокон в составе мышцы, тем выше эффект рекуперации для данной мышцы. Для сухожилий и мышечной оболочки имеет процентное соотношение типов коллагена и эластина.
При вертикальном типе передвижения (с оптимальным мышечным балансом) мышечные затраты сведены к минимуму. Скелет человека «запружинен» эластической тягой/натяжением связок, фасций и мышечными соединительно-тканными структурами. Часто такую организацию называют мышечно-фасциальные поезда.
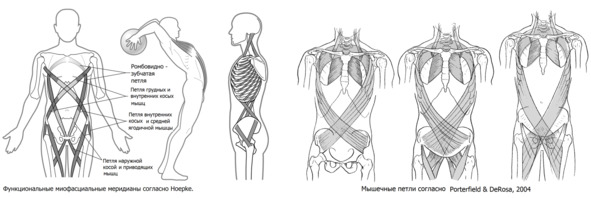
В такой системе происходит передача тягового усилия упруго-эластических компонентов с одних мышечно-фасциальных групп на другие. Такая система построена по типу хиральной системы, в которой все элементы закручены по спирали относительно центральной оси. При движении происходит чередование фаз скручивания-раскручивания с накоплением и отдачей энергии.
Во время бега спортсмен может сохранять около 80% полной механической энергии.
Таким образом, наиболее важным фундаментальным отличием локомоции человека от его эволюционных предшественников является тип передвижения, при котором сила гравитации и реакция опоры (отталкивание от поверхности) преобразуются непосредственно в движение. Система локомоции человека устроена таким образом, что антигравитационная система человека напрямую использует силу гравитации в двигательном акте, преобразуя и контролируя инерцию сегментов тела для осуществления движения с одновременной стабилизацией человека в гравитационном поле.
Эволюционный скачок/рывок представляет собой переход от преимущественно использования мышечной работы с малым КПД в качестве основной движущей силы к использованию условно «бесплатной» силы гравитации с минимальными мышечными затратами на передвижение. Условная «бесплатность» требует пояснения. В этой жизни приходиться платить за все, даже за «бесплатные» вещи.
Чем сложней система, тем более она уязвима к «поломкам» при отсутствии дублирующих механизмов, поддерживающих работоспособность в критических ситуациях. Срабатывает правило: прочность цепи зависит от прочности самого слабого звена. В случае с биокинематической системой человека, самым уязвимым звеном выступает соединительная ткань – связочная и хрящевая. Данный тип ткани относится к брадитрофным, т.е. слабо питающимся и имеющим низкую репаративную способность при повреждении.
Выраженный дисбаланс в регионах скелета, нарушение сопряженности работы в смежных биокинематических звеньях могут привести к мгновенному нарушению в работе отдельных звеньев и выраженному патологическому влиянию на систему в целом.
Те «огрехи», которые «прощаются» гравитацией для локомоторных систем на 4-х конечностях (тип «стол»), не «прощаются» человеку в модели «маятник».
Общепринятая модель перевернутого маятника – сильное упрощение. В такой модели звенья маятника рассматриваются как тонкие твердые тела, вращающиеся вокруг трех идеальных цилиндрических (!) шарниров, моделирующих голеностопный, коленный и тазобедренный суставы. Для математических расчетов вполне подойдет, но в реальности все куда более сложно.
Скелет человека также «сконструирован» с учетом хиральности всех биологических систем – естественной асимметрии, свойства всего живого закручиваться по спирали.
Одно дело, если эта хиральность физиологическая и идет на повышение биокинематичесого энергетического потенциала, другое дело, если «хиральность» искусственного происхождения – «школьные» сколиозы, сколиозирование при отсутствии коррекции выраженной разницы длинны ног и другие механизмы «кручения».
Весь скелет, в той или иной мере, имеет признаки структурной асимметрии. Длинные трубчатые кости у человека тоже имеют винтообразную форму. Это увеличивает прочность и способствует рекуперации. Мышцы вокруг костей закручены по спирали. Позвоночник закручен по часовой или против часовой стрелки. Таз также имеет вид слегка скрученной чаши. Вся система при движении скручивается и раскручивается, накапливая и освобождая энергию. При этом такой механизм препятствует точечному (локальному) износу отдельных структур. Это достигнуто благодаря возможности комбинированных движений. Тазобедренные и плечевые суставы по конструкции – шаровые и обеспечивают три степени свободы. Лучезапястный и голеностопный две степени. Коленный позволяет кручение и скольжение. Подвздошные кости также смещаются относительно крестца во время ходьбы и бега.
Для описания нашей темы подходит другая, более расширенная маятниковая модель. В математических расчетах она не используется, но для раскрытия нашей темы она наиболее уместна.
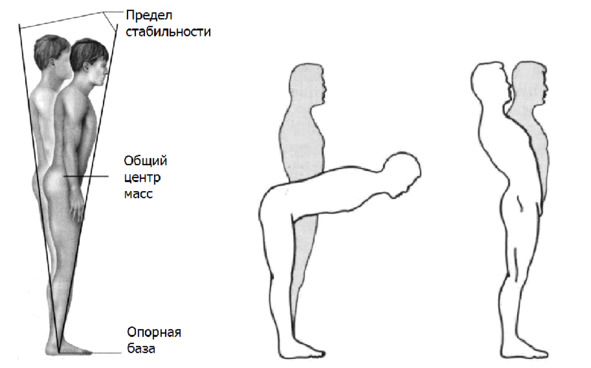
В силу конструкции позвоночника и суставов, свободно стоящий человек не может остановиться в неподвижном состоянии (нет костного замыкания суставов). Удержание вертикальной позы сопровождается колебательным покачиванием из стороны в сторону относительно вектора гравитации в пределах малых амплитуд. Происходят достаточно сложные взаимовлияющие колебания как общего центра масс (ОЦМ), так и центра давления (ЦД) стоп на плоскость опоры, которые не совпадают по амплитуде и фазности. Это своеобразное равновесное самостабилизирующее раскачивание общего центра масс над площадью опоры. Описывается как «устойчивый конус».
Центр давления (ЦД) – это та интегральная точка на плоскости опоры, в которую объёмное геометрическое тело – человек, имеющий различную плотность тканей организма и постоянно меняющуюся конфигурацию сегментов туловища, как бы «усредняется» в реальном режиме времени в ходе поддержания вертикальной стойки.
Общим свойством ЦД и проекции ОЦМ устойчиво стоящего человека является локализация в пределах координат границы опоры человека (так называемого стопного треугольника).
В условиях постоянно действующего гравитационного поля Земли процесс отклонения тела человека от вертикали в информационном плане является абсолютно необходимым для последующего восстановления утрачиваемого равновесия.
У здорового человека функцию равновесия можно охарактеризовать как устойчивое неравновесие. Основную роль в поддержании «устойчивого неравновесия» выполняет преимущественно тоническая мускулатура. ЦНС «мозаично» перераспределяет напряжение между различными группами постуральных мышц, работающих в аэробном, наиболее экономичном режиме.
Подобные покачивания незначительны и представляют своеобразную «немую» нейтральную зону, в пределах которой отсутствует активная коррекция положения ОЦМ относительно опоры.
В связи с динамическими взаимодействиями между кинематическими звеньями скелета, отклонение от положения равновесия в любом из отдельно взятых сегментов приводит к необходимости вырабатывать корректирующие силовые моменты во всех суставах. Компенсировать возмущающий фактор и возвращать ОЦМ в равновесную точку.
При увеличении раскачивания или любом произвольном движении, связанном со смещением ОЦМ за площадь опоры, происходит активная коррекция положения ОЦМ или возвратом ОЦМ в проекцию площади опоры за счет мышечного сокращения, или увеличением площади опоры (например, простым расставлением ног более широко).
В вертикальном положение стоящий человек при медленных минимальных возмущениях наиболее часто использует «голеностопную стратегию», рефлекторно (неосознанно) изменяя угол в голеностопном суставе. При быстром возмущении используется «тазобедренная стратегия» с выравниванием через вращение в тазобедренном суставе. Часто используются две стратегии одновременно и автоматически, минуя фокус нашего внимания, т.е. неосознанно.
Колебательный процесс перемещения ЦД осуществляется по плавным дугам, с минимальными затратами энергии, что и характеризует нормальное, комфортное в субъективном плане стояние здорового человека, закрепившего удержание вертикальной позы на уровне прочного автоматизма.
Системы тонической установки тела для обеспечения сложных форм равновесия тела недостаточно. В повседневной и профессиональной (не говоря уже о спортивной) жизни смещение ОЦМ за площадь опоры вещь обыденная и нами редко замечаемая.
Препятствие падению обеспечивается динамическим равновесием или динамической стабилизацией тела в пространстве. Основным отличием её от системы тонической установки тела является возможность реагирования на действие линейных и угловых ускорений – скоростных высокоамплитудных движений в суставах с резким значительным смещением центров масс звеньев тела относительно общего (интегрального) центра масс всего тела.
ЦНС контролирует такое положение посредством тонических рефлексов положения и тонических рефлексов выпрямления.
Поддержание равновесия – удержание туловища против действия силы тяжести и способность контролировать и стабилизировать положение различных частей тела относительно друг друга во время сложных движений достигается за счет координированной работы мышечной и вестибулярной системы. Зрительная система является неспецифической для данного вида деятельности и выступает как фон.
Для поддержания равновесия тела одну из решающих ролей играет информация о гравитационной вертикали от вестибулярного аппарата и проприоцепторов тела при контакте с плоскостью опоры. Для формирования чувства равновесия необходима согласованность информации от полукружных каналов ушного лабиринта, слуховых рецепторов, проприоцепторов мышц шеи, механорецепторов связок, сухожилий и сетчатки глаз.
В результате суммирования тонических отолитовых и шейных рефлексов положения всякой позиции головы в пространстве и по отношению к туловищу соответствует совершенно определённое перераспределение тонуса мышц конечностей и глаз.
Проприоцепторы передают информацию о позе тела в пространстве и расположение конечностей относительно туловища (чувство положения). Кроме того, они регистрируют положения в суставах и их скорость (чувство движения) и могут оценивать приложенное мышечное усилие (чувство силы). Эта информация далее направляется вместе с импульсами от органов чувств и равновесия в высшие центры моторной деятельности (мозжечок и т.д.). Эти импульсы передают основную информацию для контроля движений, коррекции поддержания позы и целенаправленных действий.
Взаимодействие рефлексов положения и выпрямления обеспечивает оптимальную ригидность (жесткость) тела и закономерное перераспределение мышечного тонуса тела, конечностей и глаз в зависимости от положения относительно вектора гравитации, ощущения плоскости опоры и зрительной фиксации окружающих предметов.
Поддержание вертикальной позы – это двигательная функция, представляющая собой статическое движение, обеспечиваемое фоновой тонической мышечной активностью преимущественно разгибателей, которые за счет непрерывного взаимного перемещения звеньев тела поддерживают ОЦМ относительно площади опоры.
Если же постуральная система человека функционирует негармонично/не слаженно либо имеет место тот или иной патологический процесс, поразивший структуры, обеспечивающие функции равновесия, то в поддержании вертикальной позы дополнительно задействуется и фазическая мускулатура, в норме задействованная только при динамической стабилизации. Это приводит к снижению точности контроля выполнения движений и требует не только гораздо большего расхода энергии, но, при этом, увеличивая общую компрессионную нагрузку на опорные структуры скелета.
Вполне логичный вопрос: какое отношение это имеет к болям в спине и остеохондрозу в частности? Самое непосредственное. И не только к остеохондрозу, но и к другим поражениям опорно-двигательного аппарата: коксартрозам, гонартрозам, плоскостопию, сколиозированию и пр. Чем выше доля участия сократительного аппарата мышцы в стабилизации сустава или поддержании вертикальной позы, тем выше компрессионная нагрузка на суставы и межпозвонковые диски. Длительная компрессионная нагрузка приводит к резкому ухудшению питания и трофики в мягких тканях и запуску дегенеративно-дистрофических процессов. Происходит необратимый сдвиг обменных процессов в сторону катаболизма и необратимой деградации связочной и хрящевой ткани.
ГЛАВА 6. МЕХАНИЗМЫ РАЗВИТИЯ «НЕСПЕЦИФИЧЕСКОЙ» БОЛИ В СПИНЕ
Мне очень часто приходится слышать жалобы пациентов на то, что врачи толком не могут объяснить причины боли или, что лечение безрезультатно. Также многие пациенты выражают недовольство тем, что при смене врача новый врач начинает опровергать объяснения предыдущего и дает объяснение по-своему. Поскольку лечение может затянуться, то при попытках выяснить причины хронизации боли пациенты начинают самостоятельно выискивать информацию в интернете или консультируются с такими специалистами как массажисты, тренера фитнесс-центров, мануальщики и пр., что еще больше запутывает пациентов и повергает в уныние и депрессию.
Все это бесперспективно и не имеет никакого смысла.
Как я уже говорил раньше, все лечение боли в спине пытаются переложить на плечи семейных врачей и терапевтов. В крайних случаях (при выявлении серьезной патологии) пациенты будут перенаправляться к неврологам или другим смежным специалистам. Одной из причин, по которой лечение болей в спине «поручают» семейным врачам и терапевтам, является их низкий уровень знаний в области вертеброневрологии. Когда врач не знает и не понимает причин и механизмов боли и патологии позвоночника, то это как раз именно тот специалист, который строго будет придерживаться установленных алгоритмов лечения, и не будет «своевольничать» и подстраивать схемы под каждого конкретного пациента. Что, собственно, и нужно заинтересованным лицам. Перед данными специалистами не стоит задача вылечить. Главная их задача – выписать нужный препарат. Второй причиной, по которому никто из вышеупомянутых специалистов не сможет что-либо внятно объяснить является то, что все отечественное медицинское терапевтическое мировоззрение строится на физиологии Павлова и примитивном учении о рефлекторных дугах. Опираясь на устаревшее учение о рефлексах объяснить причины боли рядовому семейному врачу очень сложно (попросту невозможно), но для выписки рецепта устаревшей концепции вполне хватит.
Для вертеброневрологии как отрасли медицины физиология Павлова не подходит, – она слишком примитивно объясняет все процессы. Для объяснения многих болевых и неврологических феноменов подходит физиология движения Н. А. Бернштейна и теория функциональных систем П. А. Анохина. Хронизация боли – работы А. Р. Лурия, С. Н. Крыжановского, И. М. Фейгенберга, О. С. Андрианова, Р. Мелзака.
Поэтому И. Р. Шмидт (2004) делает такой вывод:
«При изучении роли центра и периферии в реализации остеохондроза позвоночника (ОП), неврологических проявлений (ОП) и сопровождающих их патобиомеханических изменений, было установлено, что врожденный дефицит преднастройки и вероятностного прогнозирования, моторная неодаренность, функциональная асимметрия мозга, особенности личности и личностного реагирования, а также искаженная проприоцептивная афферентация оказывают существенное влияние на реализацию генетической предрасположенности к ОП и на клинический полиморфизм неврологических проявлений ОП. В формировании неврологических и патобиомеханических синдромов участвуют все пять уровней организации движений, по Н. А. Бернштейну».
Я думаю, что после изучения главы читатель поймет, почему не дали развиться такой специальности как «вертеброневрология» и почему всячески льют грязь как на вертеброневрологов, так и на Я. Ю. Попелянского в частности.
Поскольку читатель, вероятнее всего, о физиологии движения, разработанной выдающимся советским физиологом Николаем Александровичем Бернштейном, ничего не слышал, то я кратко представлю учение об уровнях организации движения.
Уровни организации движения по Н. А. Бернштейну (1947).
А – Уровень тонуса (руброспинальный) – организация движений в поле земного тяготения.
Уровень определяет функциональные возможности мускулатуры через преднастройку мышечного тонуса, влияя на сегментарный аппарат спинного мозга и фоновое изменение его возбудимости.
Отвечает за реципрокную (взаимозависимую, взаимовлияющую) иннервацию мышц, регулирует силовые и скоростные характеристики сокращения мышц. Абсолютный монополист по тонусу мышц во всей центральной нервной системе.
B – Уровень синергий (усиление эффекта за счет взаимовлияния; содружественное и взаимодополняющее действие (таламо-паллидарный)) – организует движения в системе координат собственного тела, частей тела относительно друг друга посредством обширных мышечных синергий, обеспечивающих согласованную работу многих десятков мышц.
Преодолевает и использует реактивные силы в управлении многозвенными маятниками конечностей.
Использует стойкие штампы и автоматизмы, контролирует динамическую устойчивость движений, которые требуют точной согласованности ритмически повторяющихся во времени сложных комбинаций движений, охватывающих все конечности и туловище (ходьба, бег, плавание и другие).
Точно воспроизводит один и тот же пространственный и ритмический рисунок движения.
Способен к согласованию мышечных усилий в опорном положении, вне зависимости от информации, поступающей от телерецепторов (глаза, слух).
Контролирует всю внутреннюю черновую технику сложных движений, определяя индивидуальные особенности моторики.
C – Уровень пространственного поля (пирамидно-стриальный) – организовывает движения в системе координат окружающего пространства: координат, связывающих тело и его части с предметами пространства и сами предметы между собой.
Отвечает за организацию движений частей тела или всего тела относительно предметов пространства, точность и меткость в овладении пространством, заполненным объектами, имеющими размер, форму и массу. Движения уровня пространственного поля имеют ясно выраженный целевой характер, вектор, координату в пространстве.
Использует дистантные рецепторы (глаза).
D – Уровень действий (теменно-премоторный) – организует движения собственного тела и его частей с целью приведения в движение окружающих предметов относительно друг друга в соответствии со смысловой задачей, смысловой сущностью предметов, их свойствами и объективно закономерными внутренними и внешними связями. Уровень манипуляции с предметом – «ручное» мышление.
Е – Абстрактный уровень – символические координации – организация движений в соответствии с мыслимой целью движения, воспроизведение образов предметов и явлений посредством речи, письма.
За выполнением любой двигательной задачи отвечает моторный контроль. Высшие мозговые центры выполняют управляющую роль относительно нижерасположенных центров. Любая задача решается через выполнение моторных программ, которые централизованно хранятся внутри многочисленных моторных областей мозга и частях ЦНС.
Моторные области развиваются у человека от нижележащих отделов (спинной мозг) к вышележащим (ассоциативные области коры головного мозга) и деградируют в обратном порядке от вышележащих к нижележащим.
Для построения движений различной сложности команды отдаются на различных уровнях нервной системы. Выполнение моторной активности инициируется, координируется и контролируется центральными механизмами, которые действуют на основе иерархии. Каждый уровень выполняет свою строго специфическую функцию; при этом он может воздействовать как на низшие, так и на высшие уровни в зависимости от поставленной двигательной задачи, выступая управляющим уровнем.
Структуры ЦНС на протяжении жизни накапливают необходимые модели/шаблоны двигательных актов, формируют и хранят «заготовки» программ по реализации различных двигательных стратегий.
Привычно реализуемые шаблоны воспроизводятся как стереотипы. Статичных стереотипов, установленных по умолчанию, не существует.
Любое целенаправленное действие представляет собой последовательное выполнение моторных программ, состоящих из шаблонов с коррекцией на текущую ситуацию.
Когда наступает момент выполнить какое-либо действие, основной шаблон или список моторных заготовок уже существует в ЦНС. В связи с требуемыми обстоятельствами он модифицируется по силе, времени и направлению, что приводит к выполнению уже нового движения, но по выверенным правилам для выполнения данной группы задач. Вариант импровизации. Повторение без повторения на основе имеющихся заготовок.
Моторные программы условно делятся на генерализованные – локомоторные и задача-специфические – разовые неповторяемые.
Моторные программы в ЦНС не содержат специфических движений, но включают общие правила для специфического класса движений. Наиболее часто используемые программы выполняются наиболее координировано и с наименьшей энергетической стоимостью и наименьшими погрешностями.
Вокруг значимой двигательной задачи происходит динамическая самоорганизация функциональных систем и субсистем, обеспечивающих выполнение целенаправленного действия для решения определенной двигательной задачи. Для реализации движения все системы должны работать синхронно и при этом не истощать смежные системы.
Для согласованной работы всех уровней организации движения ЦНС должна оперировать точными данными с периферии со всех подконтрольных структур.
Сенсорный (афферентный) поток непрерывно идет во все анализирующие центры головного мозга.
Для точного управления движением ЦНС непрерывно анализирует параллельные потоки сенсорной информации, идущей от связочного аппарата, мышц, кожных покровов, вестибулярного аппарата и глаз.
Сенсорная информация, идущая из связок, сухожилий, капсул суставов, фасций и межпозвонковых дисков имеет первостепенное значение в планировании будущего движения. На основе данной информации ЦНС выбирает из списка имеющихся шаблонов группу шаблонов, на основе которых будет «сконструировано» и реализовано будущее движение. Можно сказать, что информация с сухожильно-связочного аппарата используется для прогнозирования будущих двигательных сценариев, планирования движения и подготовки упреждающих команд.
Информация, поступающая с мышц, используется для коррекции движения непосредственно при выполнении самого движения.
Информация с кожных рецепторов является уточняющей. Разделение сенсорных потоков условно и применено для облегчения восприятия. ЦНС рассматривает всю входящую информацию цельным двигательным сенсорным паттерном («рисунком»).
Благодаря совершенству моторного контроля человек выполняет сложные двигательные задачи с минимальными энергозатратами и с минимальным износом опорных и миофасциальных структур скелета, но при условии, что все системы и подсистемы работают слаженно и в оптимальном режиме.
Введение