Полная версия
Законы и закономерности развития систем. Книга 4
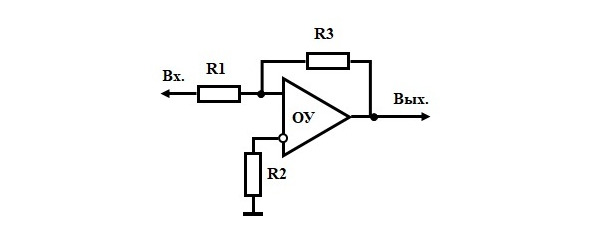
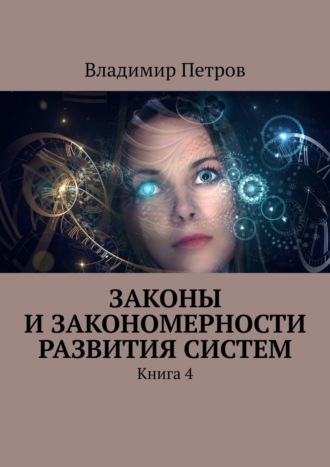
Рис. 22.16.Схема генератора:
ОУ – операционный усилитель, R1, R2, R3 – сопротивления
Пример 22.15. Возбуждение
Реакция возбуждения нервной системы является примером положительной обратной связи. Если не срабатывает отрицательная обратная связь, то организм перевозбуждается, что может привести к болезням или летальному исходу.
Вместе с тем положительная обратная связь выводит организм из застоя – переводит его на новый уровень, например, помогает в творчестве.
Пример 22.16. Инфляционные ожидания
В качестве примера положительной обратной связи рассмотрим проблему инфляционных ожиданий. Рост инфляционных ожиданий вынуждает людей делать больше покупок, чем необходимо. Увеличение спроса приводит к росту цен и усиливает инфляцию, что в свою очередь способствует повышению инфляционных ожиданий.
Самонастраивающаяся система – это система, в которой приспособление к случайно изменяющимся условиям обеспечивается автоматическим изменением параметров настройки или путем автоматического поиска оптимальной настройки. Самонастраивающуюся систему также называют адаптивной или самоприспосабливающейся.
В самонастраивающихся системах параметры меняются в более широком диапазоне по сравнению с обычными (не самонастраивающимися) системами, в которых осуществляется первоначальная настройка (создание определенных параметров) при разработке системы. Такие параметры влияют на устойчивость и качество процессов управления. Если эти параметры остаются неизменными, а условия функционирования (характеристики управляемого объекта, возмущающие воздействия) существенно изменяются, то процесс управления может ухудшиться или даже стать неустойчивым. Ручная настройка системы часто оказывается обременительной, а иногда и невозможной. Использование в таких случаях самонастраивающейся системы технически и экономически целесообразно и даже может оказаться единственным способом надежного управления.
Самонастраивающаяся система сохраняет работоспособность даже в условиях непредвиденного изменения свойств управляемого объекта, цели управления или условий окружающей среды посредством смены алгоритмов своего функционирования или поиска оптимальных состояний.
Развитой адаптивной способностью обладают все живые организмы.
Пример 22.17. Коммутатор
Коммутаторы предназначены для подключения и отключения входных сигналов. Они широко используются в серверах, чтобы повысить производительность пропускания каждого из каналов (портов). Каждый из портов имеет определенную скорость пропускания информации, что ограничивает общую производительность ее прохождения.
Компания IBM разработала коммутатор с самонастраивающимися портами, способными автоматически выбирать наибольшую скорость пропускания информации без блокировки каналов.
Пример 22.18. «Умные» кроссовки
Компания Adidas создала кроссовки снабженными микропроцессорами, датчиками и микромотором (рис. 22.27). Кроссовок адаптируется под почву, меняя амортизационные характеристики подметки. Кроссовки сами приспосабливаются к габаритам бегуна и длине его шага, выбирают оптимальную упругость для любого покрытия – от твердого до пересеченной местности и от сухих улиц до влажного океанского берега. Вес кроссовок составляет 400 г, из которых на «электронно-мозговую» часть приходится всего 40 г. Через каждые 100 ч необходимо менять батарейку.

Рис. 22.27. «Умные» кроссовки
Самообучающаяся система – это система, алгоритм функционирования которой совершенствуется путем самообучения в процессе работы, улучшая функционирование системы.
Пример 22.19. Выявление подозрительного поведения
Ученые американского университета штата Огайо разрабатывают систему, которая сможет автоматически выявлять факты подозрительного поведения людей на улицах.
Самообучающаяся система сможет распознавать в видеопотоке странные действия людей и машин, отслеживать выбранные объекты и при необходимости информировать полицию или скорую помощь.
На протяжении нескольких месяцев она накапливает сведения о типовых маршрутах передвижения по контролируемой улице и способна, например, отличать граждан, спешащих на работу, от заблудившихся подростков.
Пример 22.20. Поисковые системы
Информацию в Интернете ищут с помощью специальных поисковых систем, например, поисковой машины Google, которая обрабатывает в месяц более 40 млрд запросов. Программа поисковой машины самостоятельно изучает запросы и впоследствии предоставляет клиентам информацию, более подходящую для каждого из них. Например, предоставляет информацию, к которой чаще всего обращаются.
Самоорганизующаяся система – это система, которая способна синтезировать модель структуры системы в зависимости от ее предназначения и окружающих ее условий. Она разрабатывает алгоритм работы системы, проектируя систему управления, и по синтезируемой модели создает саму систему из имеющихся элементов. Такая система способна перестроить структуру системы, чтобы приспособиться к внутренним или внешним изменениям.
В простейшем случае система способна изменить связи между подсистемами, а в сложнейшем случае заменять, добавлять или изменять подсистемы для создания структуры, способной наилучшим образом выполнить необходимые функции.
Основное отличие самоорганизующейся системы от самонастраивающейся системы заключается в том, что в первой в процессе приспособления преобладают качественные изменения, а во второй – количественные.
Пример 22.21. Самоорганизующийся робот
В лаборатории вычислительного синтеза Корнельского университета (США) разработали опытный образец робота (рис. 22.28), способного синтезировать свою структуру в зависимости от окружающих его условий и обстоятельств и воспроизвести себя из универсальных элементов – кубиков (рис. 22.28а).
На поверхности кубиков имеются электромагниты, с помощью которых они могут соединяться и разъединяться друг с другом; питание подводится через контакты на поверхности монтажного стола.
Каждый куб разделен пополам по диагонали на две части, которые способны вращаться относительно друг друга. При этом робот, составленный из множества кубиков, воспроизводит сам себя. Так, трехмодульный робот способен воспроизвести себя в течение одной минуты.
Процесс происходит так. Робот изгибается, ставит свой собственный куб на стол и надстраивает его новым кубом, который подают люди. При этом новый робот помогает в комплектации его собственной конструкции.

Рис. 22.28.Самоорганизующийся робот
Первоначально робот создает свою модель и по ней синтезирует систему управления, что осуществляется в результате ограниченного количества физических экспериментов (это поисковая самонастраивающаяся система).
Алгоритм работы робота позволяет ему функционально компенсировать механические повреждения в результате коррекции собственной модели.
Саморазвивающаяся система – это самообучающаяся система, способная не только накапливать знания, но и развивать себя в соответствии с поставленными целями.
Пример 22.22. Саморазвивающаяся компьютерная система
В патенте США 5 072 406 описана саморазвивающаяся компьютерная система, память которой содержит блоки инструкций, специальных знаний и базовых данных. Блок специальных знаний включают знания конкретной области и стратегию их использования. Блок базовых данных включает знания по использованию инструкций.
При поступлении входного сигнала он обрабатывается и перепроверяется по всем блокам с учетом имеющихся инструкций и базовых данных, вырабатывая выходной сигнал. При выявлении новых знаний они заносятся в блок специальных знаний. В процессе деятельности блок специальных знаний может изменять инструкции, постоянно развивая компьютерную систему.
Пример 22.23. Саморазвивающийся робот
В швейцарском университете Чалмер (Chalmers) создали робот HR-2 (рис. 22.29). Он обладает 22 степенями свободы, что позволяет ему легко перемещаться и копировать движения человека. Робот имеет объемное зрение, делая возможным координировать движения рук. Он повторяет показанные ему движения рук. Искусственный мозг обладает развитой нейронной сетью. Робот способен различать лица людей и говорить. Он самообучается и саморазвивается.
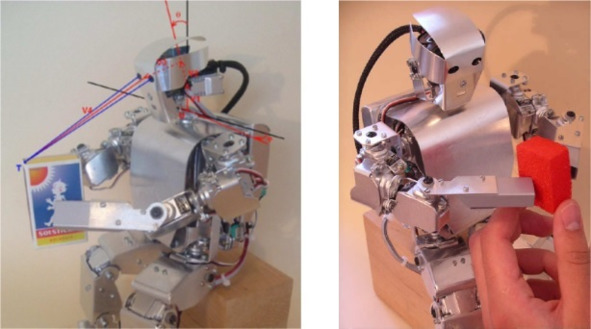
Рис. 22.29. Саморазвивающийся робот HR-2
Самовоспроизводящаяся система – это самоорганизующаяся, саморазвивающаяся система, способная создать подобную себе систему.
Основное отличие самовоспроизводящейся системы от самоорганизующейся заключается в том, что в первой используются готовые подсистемы, а во второй – их изготовляет сама система.
Самовоспроизводящиеся системы, прежде всего, характерны для живых организмов. Клетка сама себя воспроизводит. Немалую роль в этом играют стволовые клетки.
Пример 22.24. Стволовая клетка
Стволовые клетки – это особые клетки живых организмов (клетки-родоначальницы), каждая из которых способна впоследствии изменяться (дифференцироваться6) особым образом (т. е. получать специализацию и далее развиваться как обычная клетка). Стволовые клетки могут давать начало любым клеткам организма: кожным, нервным, клеткам крови и т. д.
Они способны асимметрично делиться, из-за чего при делении образуется клетка, подобная материнской (самовоспроизведение), а также новая клетка, которая способна дифференцироваться.
Иерархия стволовых клеток показана на рис. 22.30.
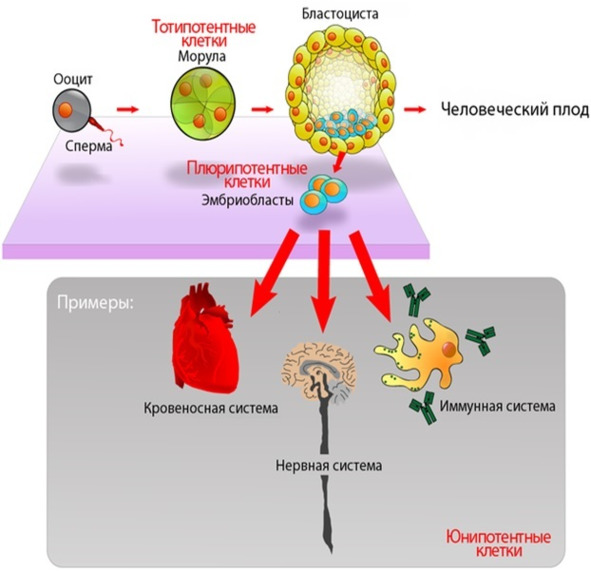
Рис. 22.30. Иерархия стволовых клеток
Пример 22.25. Самовоспроизводящаяся машина
Доктор Adrian Bowyer из университета Ванны в Великобритании разработал машину RedRap (Replicating Rapid-prototyper), которая 29 мая 2008 г. в 14:00 воспроизвела свою копию (рис. 22.31). Пластмассовые детали для этой машины изготовлялись на 3D-принтере, встроенном в машину.
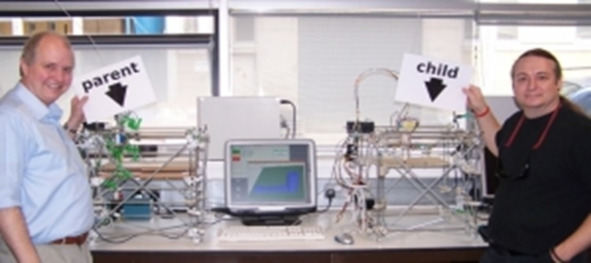
Рис. 22.31. Самовоспроизводящаяся машина (слева) и ее копия (справа)
22.3. Уменьшение степени управляемости
Закономерность уменьшения степени управляемости указывает на тенденцию создания простых приспособлений без механизации и автоматизации. Эта закономерность противоположена закону увеличения степени управляемости.
Пример 22.26. Инструмент для очистки апельсинов
Он представляет собой только одну деталь, отлитую из пластмассы (рис. 22.32). Инструмент одевается на палец. Полукруглая форма инструмента позволяет легко скользить по поверхности апельсина, а размер и форма ножа легко надрезает кожуру и не портит сердцевину. На конце сделана лопатка, помогающая приподнимать кожицу. Это очень простой, удобный и малогабаритный инструмент. Такого типа инструменты появлялись и в прошлом, например, различные приспособления для открывания консервов и бутылок. Они будут изобретаться и в будущем.
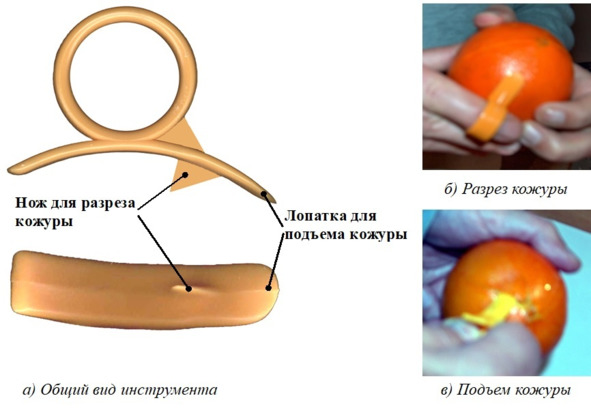
Рис. 22.32. Инструмент для очистки апельсинов
22.4. Закономерность увеличения степени динамичности
Развитие системы идет в направлении увеличения степени динамичности.
Динамичная система может изменять свои параметры, структуру (в частности форму), алгоритм, принцип действия и функции, чтобы наиболее эффективно достичь поставленную цель и удовлетворить потребность. Динамическая система в своем развитии может менять так же цель и потребность, приспосабливаясь к внешним и внутренним изменениям.
Изменения могут происходит:
– во времени;
– по условию.
Следствия из закономерности.
1. Статические системы стремятся стать динамическими.
2. Системы развиваются в сторону увеличения степени динамичности.
Пример 2.27. Катамаран
Парусные катамараны – суда с двумя корпусами, что повышает их устойчивость по сравнению с обычными однокорпусными яхтами.
Для увеличения маневренности расстояние между корпусами должно быть, как можно меньше, но это уменьшает остойчивость катамарана при большой волне.
Во время спокойной погоды корпуса катамарана должны быть на небольшом расстоянии, а при шторме – на большом расстоянии.
Корпуса должны иметь возможность раздвигаться и сдвигаться, – быть динамичным – изменяться в зависимости от состояния моря (штиль или волнение).
Соединение между корпусами сделали подвижное, которое может быть отрегулировано в зависимости от увеличенной маневренности (рис. 22.33).
Это пример изменения структуры по условию (высота волны). Статическая система стала динамической.
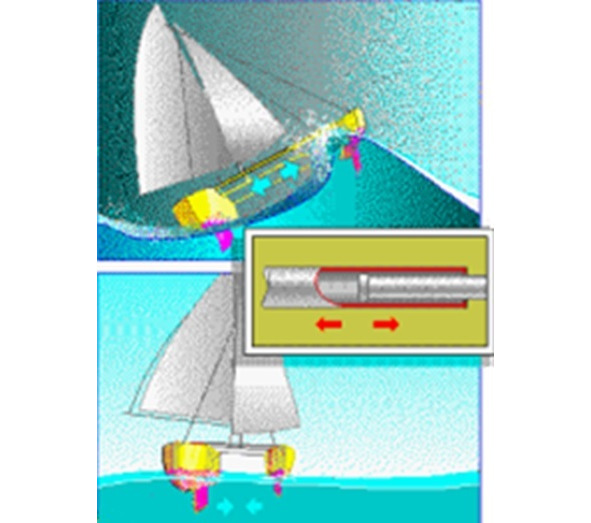
Рис. 22.33. Катамаран
Приведем пример на увеличения степени динамичности.
Пример 22.27. Электронная книга
Первоначально книга представляла собой свиток (рис. 22.34а), как правило, из папируса или пергамента.
В дальнейшем книги делались из отдельных листков, скрепленных вместе переплетом (рис. 22.34б). Их стало удобнее читать, и они занимали меньше места. Но книги используют бумагу, для получения которой необходимо уничтожать лес. Они много весят, занимают много места на полках и пылятся.
Далее книги стали переводить в электронный вид и читали с экрана компьютера (рис. 22.34в). Такие книги не использовали бумагу, занимали мало места и не пылились, в одном компьютере можно иметь большую библиотеку, но появились неудобства, связанные с процессом чтения, – не везде удобно читать с компьютера, например, в кровати. В дальнейшем появились лэптопы (рис. 22.34г), мини-компьютеры, планшеты и смартфоны (рис. 22.34д). Их легко переносить и читать удобно в любом месте. Смартфоны и планшеты сегодня получили наибольшее распространение.
Общий недостаток компьютеров – не все любят читать с экрана. Кроме того, чтение с экрана портит зрение, так как экран излучает свет, который непосредственно направлен в глаза.
Выпустили электронную книгу (e-book reader), в которую можно загружать много книг (рис. 22.34е).
Такие книги используют электронную бумагу (electronic paper), в которой используются электронные чернила. Электронная бумага отражает свет, так же как обычная книга, поэтому не портит зрение.
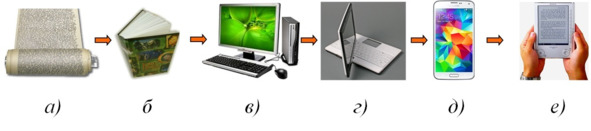
Рис. 22.34. Увеличение степени динамичности книги
22.4.1. Основная линия увеличения степени динамичности
Увеличение динамичности происходит изменением динамичности параметров, структуры, алгоритма и принципа действия, функции, потребности и цели, которое может происходить во времени, в пространстве и по условию.
Степень динамичности увеличивается переходом от изменения динамичности параметров к изменению динамичности структуры, алгоритма, принципа действия, функции, потребности и цели.
Основная линия увеличения степени динамичности показана на рис. 22.35.
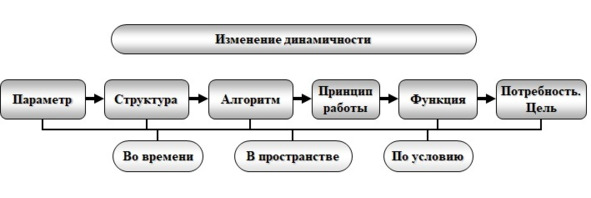
Рис. 22.35. Линия увеличения степени динамичности
Изменение параметров системы – это наиболее простой способ увеличения степени динамичности системы с целью ее адаптации к внутренним и внешним изменениям.
Изменяться может любой параметр системы, например, электрические параметры (величина тока, напряжения, сопротивления и т. д.), оптические параметры (длина волны, яркость, освещенность и т. д.), акустические параметры (амплитуда и частота звука и т. п.), механические параметры (эластичность, жесткость, вязкость, число степеней свободы и т. д.) и т. д.
Пример 22.28. Оперативные запоминающие устройства – ОЗУ (RAM)
Оперативные запоминающие устройства – ОЗУ (RAM) созданы для хранения цифровой информации. Они работают, пока на микросхему подается питание. После отключения питания информация теряется.
В дальнейшем были созданы динамические ОЗУ (DRAM). С их помощью сократили время обмена информацией (запись и считывание). Динамические ОЗУ построены на электронных приборах с зарядовой связью. Информация хранится на паразитных конденсаторах (емкостях) транзисторов, как пакеты зарядов. Они обладают высокой скоростью обмена информации (пакетов зарядов), но не способны хранить ее длительное время (<1 ms).
Для решения этой проблемы в DRAM осуществляется непрерывная циклическая перезапись (обновление) информации.
Это пример изменения параметров во времени.
Пример 22.29. Мост Тысячелетия (Gateshead Millennium Bridge)
На южном берегу реки Тайн (River Tyne) в Англии, между городами Гейтшед (Gateshead) и Ньюкасл (Newcastle upon Tyne) был построен уникальный пешеходный и велосипедный мост тысячелетия.
Это первый в мире мост с использованием наклонного механизма для прохода кораблей.
Два полукруга конструкции напоминают веки, за это в народе мост называют «Моргающий глаз» (Blinking Eye). Когда по реке идут суда, мост приподнимает нижнее «веко» (рис. 22.36б). Все остальное время оно опущено (рис. 22.36а), и пешеходы легко перебираются с одного берега реки на другой.
Это пример изменения параметров по условию (проход судна).
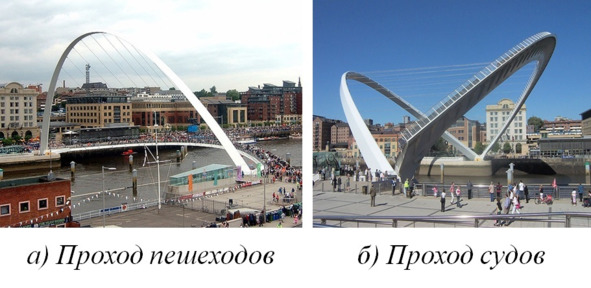
Рис. 22.36. Мост Тысячелетия (Gateshead Millennium Bridge)
Увеличение степени динамичности системы может осуществляться путем изменения структуры системы – это более сложный способ динамизации, чем изменение параметров.
Под изменением структуры мы понимаем и изменение формы объекта.
Пример 22.30. Автомобиль на поворотах
На крутых поворотах (рис. 22.37а) машину заносит, что может привести к аварии. Особенно это актуально для гоночных машин.
Как сделать машину более устойчивой на поворотах?
Шасси автомобиля делают динамичным. Подвеску делают с шарнирными связями. Автомобиль имеет возможность наклоняться на поворотах (рис. 22.37б).
Это пример изменения структуры по условию (перемещение по прямой или на поворотах).

Рис. 22.37. Автомобиль на крутых поворотах
Пример 22.31. Реактивный самолет
Подъемная сила самолета зависит от общей площади крыльев и скорости движения.
При малой скорости площадь крыльев должна быть большой, а при большой скорости большая площадь крыла создает лишнее сопротивление движению.
Если сделать реактивный самолет с малой площадью крыла, то он будет маневреннее и можно будет увеличить дальность полета, так как уменьшается сопротивление движению, а следовательно, будет затрачиваться меньше горючего. Однако малая площадь крыла требует увеличенной скорости полета при взлете и посадке, что увеличивает длину взлетно-посадочной полосы.
Как быть?
Во время взлета и посадки площадь крыла самолета должна быть большой, а во время полета – маленькой.
Крыло самолета должно менять свою площадь (большой и маленькой), – быть динамичной – изменяться в зависимости от скорости полета (посадка-взлет или полет).
Создан самолет с изменяемой геометрией крыла (изменяемой стреловидностью) (рис. 22.38).
Это пример изменения формы по условию (полет или взлет-посадка).

Рис. 22.38. Самолет с изменяемой геометрией крыла F-14
Увеличение степени динамичности системы может осуществляться путем изменения алгоритма работы.
Пример 22.32. Микросхемы
Многие современные приборы используют микросхемы. При создании новых приборов приходится или подбирать микросхему из выпускаемых промышленностью или разрабатывать и выпускать новую микросхему, что достаточно дорого стоит. Это оправдывается при массовом выпуске продукции. При проведении научных и опытно-конструкторских работ (НИОКР) и при выпуске единичных и мелкосерийных продуктов разработка и выпуск новых микросхем не выгодны и существенно влияют на себестоимость продукции.
Разработали программируемые логические интегральные схемы – ПЛИС (Field Programmable Gate Arrays – FPGA). В отличие от обычных цифровых микросхем логика работы ПЛИС не создается при изготовлении, а устанавливается посредством ее программирования.
ПЛИС представляет собой набор элементов, расположенных в виде матрицы. Между элементами расположены соединительные трассы, представляющие собой программируемые ключи, соединяющие необходимые блоки. Пользователь может создать нужную для него структуру, программируя определенную логику.
Таким образом, данная микросхема позволяет менять ее внутреннюю структуру и алгоритм работы в зависимости от функции, которую необходимо выполнять. ПЛИС можно перепрограммировать под новую функцию.
Это пример изменения структуры, алгоритма и функции по условию (принцип работы или изменение принципа работы).
Увеличение степени динамичности системы может осуществляться путем изменения ее принципа действия.
Пример 22.33. Обрабатывающий центр
Обрабатывающий центр – это станок с числовым программным управлением (ЧПУ), предназначенный для последовательного выполнения нескольких технологических операций различными инструментами по заданной программе. В качестве инструмента могут быть использованы: резец, фреза, сверло, плазма, лазер и т. п. При переходе к следующей операции станок меняет инструмент, а следовательно, и принцип действия, и алгоритм работы.
Это пример изменения структуры, алгоритма и принципа действия по условию (переход к другой операции).
Увеличение степени динамичности системы может осуществляться путем изменения выполняемой функции.
Пример 22.34. Мобильный телефон
Современный мобильный телефон выполняет много различных функций.
Это пример изменения алгоритма, принципа действия и функции по условию, выполняющего ту или другую потребность владельца.
Увеличение степени динамичности системы может осуществляться путем изменения потребностей.
Пример 22.35. Компьютер
Компьютер является наиболее развитой динамической системой. Трудно перечислить все функции, которые он выполняет и потребности, которые он удовлетворяет.
Это пример изменения алгоритма, функции и потребностей по условию (желание владельца).
Увеличение степени динамичности системы может осуществляться путем изменения целей.
Пример 22.36. Беспилотный самолет
Беспилотный самолет может изменить цель своего полета в зависимости от изменения обстоятельств. Например, перейти от наблюдения к боевым действиям.
Это пример изменения цели по условию.
22.4.2. Повышение динамичности
Система тем динамичнее, чем она более управляемая.
Динамичность системы повышается с увеличением скорости и точности адаптации к внешним и внутренним изменениям.
Скорость увеличения динамичности повышается с учетом изменений не только определенного параметра, а и его производных.
Идеально, когда система заранее готова к изменениям, т. е. имеет способность заранее прогнозировать изменения. С этой целью система должна использовать и/или выявлять и использовать тенденции, закономерности и законы развития системы, надсистемы и окружающей среды.
Точность адаптации может быть увеличена, если в законе управления системой учитывается интеграл от всех изменений или ведется учет предыдущих изменений.