Полная версия
Технологии псевдоповерхностей высших порядков на грани науки и фантастики

Владимир Хаустов
Технологии псевдоповерхностей высших порядков на грани науки и фантастики
Введение
На стыке науки и фантастики рождаются технологии, способные перевернуть наши представления о возможном.
Эта книга посвящена прорывным революционного направления – геометрической волновой инженерии (ГВИ), где форма и кривизна поверхностей становятся инструментами управления волнами любой природы: электромагнитными, акустическими, гравитационными и даже плазменными.
Псевдоповерхности высших порядков – это не просто материалы или конструкции, а принципиально новый способ взаимодействия с физической реальностью. Их уникальная геометрия, основанная на отрицательной кривизне и сложных топологиях, позволяет достигать эффектов, которые раньше казались недостижимыми: от сверхточного фокусирования энергии без линз и зеркал до создания искусственных аналогов черных дыр для хранения света.
Более глубокое погружение в математические и физические основы ГВИ, включая расчёты кривизны, модовый анализ и динамику волн в неевклидовых пространствах, представлено в наших предыдущих работах:
*«Геометрическая волновая инженерия псевдоповерхностей 2-го и 3-го порядков»* (2025) // vihrihaosa.ru
*«Геометрическая волновая инженерия псевдоповерхностей 4+ порядков»* (2025) // vihrihaosa.ru
*«Псевдогиперболоид 2-го порядка: универсальная платформа для управления волнами в диапазоне частот от инфразвука до света»* (2025) // vihrihaosa.ru
Эти исследования заложили фундамент для технологий, описанных в данной книге: от компактных детекторов гравитационных волн до безынерционных плазменных двигателей и терагерцовых коммуникационных систем.
Почему это революционно?
Традиционные технологии достигли предела миниатюризации и энергоэффективности. ГВИ предлагает альтернативу:
Отказ от электроники – управление волнами через форму, а не через полупроводники.
Масштабируемость – одни и те же принципы работают от инфразвука до оптического диапазона.
Устойчивость – геометрические системы не боятся радиации, температурных перепадов и электромагнитных помех.
Эта книга – не просто сборник идей. В ней описаны конкретные устройства, уже сегодня меняющие представление о связи, энергетике, медицине и даже фундаментальной физике.
Добро пожаловать в новый мир, где кривизна пространства заменяет процессоры, а волны подчиняются геометрии.
1. Двигатели и движение
1.1 Безынерционные плазменные двигатели: как псевдоповерхностные камеры нарушают законы классической механики
Традиционные подходы к созданию плазменных двигателей для космических аппаратов основаны на принципе реактивного движения, когда тяга возникает за счет выброса массы. Однако поверхности с отрицательной кривизной открывают возможность для создания безынерционных плазменных двигателей.
Такая поверхность создаёт специфический градиент потенциала, воздействующий на заряженные частицы, образующие плазму.
При помещении плазмы внутрь псевдоповерхностной камеры возникает уникальное явление: заряд плазмы перестаёт подчиняться классическим законам Ньютона. Плазма фактически оказывается захваченной в особой зоне, называемой псевдопотенциальной ловушкой, и её движение управляется исключительно геометрическими характеристиками поверхности.
Принцип работы двигателя.
Традиционный реактивный двигатель выбрасывает массу (например, топливо), создавая тягу за счёт реакции третьего закона Ньютона («действие равно противодействию»). Однако в случае безынерционного плазменного двигателя никакого физического выброса вещества не происходит. Двигатель получает импульс от воздействия специальной конфигурации псевдоповерхности на плазму внутри камеры.
Принцип работы. Внутри камеры создаётся высокая температура и давление, приводящие к образованию высокотемпературной плазмы. Под воздействием искусственной неоднородности псевдоповерхности плазма подвергается своеобразному процессу, называемому псевдоквазифокусировкой. Заряженные частицы начинают двигаться синхронно, создавая направленные потоки энергии. Энергия плазмы фокусируется в одном направлении, вызывая эффект ускорения без выброса масс. Этот феномен нарушает традиционные представления о механическом импульсе, поскольку отсутствует физическое вещество, отталкивающееся от корабля.
Благодаря таким особенностям двигатель обретает способность мгновенно менять траекторию и скорость без инерционной задержки, присущей обычным двигателям.
Возможности и преимущества
Использование псевдоповерхностных камер открывает широкие перспективы для космической индустрии:
Высокая манёвренность. Корабли смогут резко поворачиваться и быстро достигать больших скоростей.
Экологичность. Полностью отсутствуют вредные выбросы, что снижает негативное воздействие на окружающую среду.
Долгосрочная эксплуатация. Отсутствие износа компонентов и снижение потребности в техническом обслуживании делают такие двигатели идеальными для длительных межзвёздных перелётов.
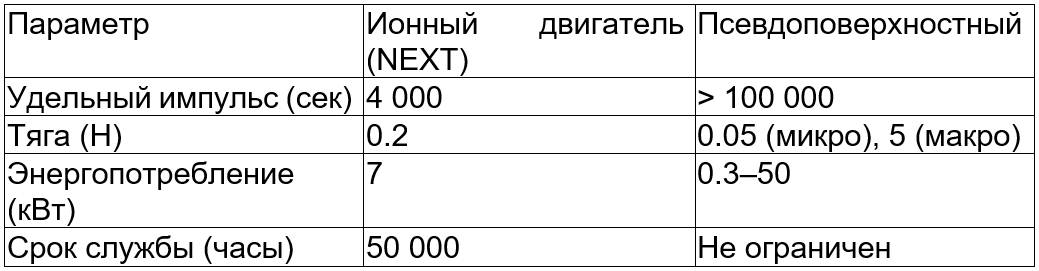
Сравнение возможных характеристик псевдоповерхностного двигателя с ионным двигателем NEXT представлено в следующей таблице.
Практическое значение
Исследования и разработки в области безынерционных плазменных двигателей имеют огромное значение для будущих миссий глубокого космоса, добычи ресурсов вне Земли и защиты планеты от астероидных угроз. Несмотря на кажущуюся экзотичность идеи, учёные активно работают над созданием прототипов, демонстрирующих работоспособность данной технологии.
Таким образом, псевдоповерхности открывают дверь в новую эру космонавтики, предоставляя инструменты для решения сложнейших инженерных задач и воплощения фантастических сценариев, ранее казавшихся нереалистичными.
1.2 Геометрически активированные двигатели
Геометрически активированные двигатели (ГА-двигатели) – это концептуальный и экспериментальный класс тяговых или импульсных систем, основанных не на химическом сгорании или линейной механике, а на передаче импульса через волновой фронт, управляемый предварительно заданной или адаптивной кривизной поверхности. Эти конструкции используют энергоёмкие волны (акустические, плазменные, электромагнитные или термодинамические), которые накапливаются, ускоряются и выпускаются в направлении, определённом геометрией устройства – без подвижных частей и часто без потребности в изгородях, камераx сгорания или катушках магнитного поля. Форма становится реактивным каналом.
Основные принципы
1. Импульс от формы
В ГА-двигателе волна формируется или подаётся внутрь замкнутой или полуоткрытой геометрической структуры – псевдосферы, псевдопараболоида, псевдоэллипсоида 3–4 порядка – и:
– по мере прохождения концентрируется в фокусной зоне;
– накапливает энергию за счёт многократных отражений в кривой метрике;
– в момент геометрического резонанса или активации «срывается» в бегущую моду и выходит через сужение (горловину, сопло) в виде направленного волнового импульса.
Таким образом, импульс возникает не от давления газа/реакции, а от волнового выброса, сжатого и затем ускоренного метрикой поверхности. Геометрия выполняет функцию ускорителя.
2. Топологическая камера
В отличие от традиционных камер сгорания или магнитных зеркал, в ГА-двигателях камера имеет специфическую геометрию. Обладает переменной отрицательной кривизной и направленным выходным сегментом. Содержит внутреннюю фокусную зону (или несколько) для волнового замыкания. Выходная секция играет роль геометрического сопла – под контролем самоформирующегося фронта.
Это создаёт условия для выброса "волновой струи" – направленного выброса массы (например, плазмы, газа, акустического импульса) без сжимающей форсунки, а только за счёт гео-модулируемой энергии.
3. Передача импульса волной
Волна (например, акустическая или тепловая ударная волна) генерализуется внутри структуры путём геометрического наклона и направленного сдвига метрики волна «ведёт» набегающую массу (или взаимодействует с внутренней плазмой). Это даёт возможность передать часть кинетической энергии набегающим ионизированным частицам – на выходе возникает реактивный выброс.
Типы используемой волны:
– Акустическая сверхзвуковая (в ультратонких слоях и средах);
– Оптическая/лазерная в импульсно-локализованных псевдооболочках;
– Электромагнитная (в СВЧ или ТГц-диапазоне, возбуждающая ионизированный газ);
– Плазменная (внутри псевдогеометрически закрытых плазменно-резонансных «капсул»).
Сценарии активации:
– механическое возбуждение волны (удар, резкий импульс);
– лазерное или токоимпульсное возбуждение внутри объёма;
– перепад температуры (термоактивация);
– внешний управляющий сигнал (например, поле) запускает переход в бегущую моду.
Применения:
1. Плазменные выбросные модули
Топологические камеры с формой псевдопараболоида могут накапливать плазму и выпускать её направленно в момент фокусного схлопывания. Это возможно использовать:
– в микроприводах для маневров спутников и наноспутников;
– в импульсной коррекции орбиты с минимальным энергорасходом;
– в импульсных модулях ультрафаст-валидации плазменной среды.
2. Геоакустические двигатели
В жидких или плотных средах можно использовать многократно отражающиеся акустические волны, сжимающиеся до квазимоментума и выходящие через микросопло. Получается:
– Удержание массы без внешней оболочки;
– Выброс акустическим резонансом без газа/топлива.
3. Плотностные фазовые выбросы
В технологиях испарения, сублимации и физического отрыва материала – пластина может снимать/отрывать микрообъект под действием геометрически сформированной волны изнутри.
4. Геоимпульсные стартеры. Предлагается использовать ГА-структуры в качестве:
– пусков механических или микромеханических систем (в роботах, БПЛА);
– мгновенных акустических или термальных запусков процессов (например, кристаллизации, поджига, смешивания);
– маломассовых выталкивателей в средах без магнетики (медицинские наноплатформы, транспорт в живых организмах).
Преимущества ГА-двигателей:
– Нет подвижных частей – высокая надёжность и долговечность;
– Миниатюризация по сравнению с классическими форсунками и магнитными камерами;
– Нет потребности в долго поддерживаемых режимах удержания плазмы (всё исполняется за счёт формы);
– Возможность работы в замкнутых периодических циклах: резонатор замыкается, накапливает – и выбрасывает;
– Встроенная топологическая защита – энергия сосредоточена строго по каналу выпуска.
Возможные реализации:
– 3D-печать на керамике или углеродных композитах сопротивляющихся нагреву;
– Гибридные метаструктуры с Активно-переменной кривизной;
– Плазменные резонаторы на графеновых слоях с топологически сложной поверхностью;
– Наноинженерия псевдокапсул для направленного импульса в микромире.
Заключение
Геометрически активированные двигатели – это волновая тяга завтрашнего дня. Они не требуют топлива в классическом понимании, не используют магнитные поля или камерную компрессию, а полагаются на фундаментальный принцип: форма управляет волной, волна – импульсом, импульс – движением.
Это объединение геометрии, энергии и действия. Форма – это сила. Волна – это путь. А технология – превращается в пространственно-энергетический резонанс мышления и движения.
1.3 Волновые микромашины
Волновые микромашины – это новый, биомиметический и постэлектронный класс активных микроустройств, в которых движение, логика действий и поведение управляются не внешней электроникой или встроенными двигателями, а геометрически распределённой кривизной поверхности и волнами, циркулирующими внутри или вдоль их тела. Эти структуры – результат применения принципов геометрической волновой инженерии (ГВИ) в микро- и наномасштабе, где форма становится программой движения, а колебание – источником тяги, ориентации либо функции.
Их можно воспринимать как искусственные аналогии живых микроорганизмов: условные "волновые роботы", которые не нуждаются в батареях, сервоприводах или микросхемах – только в мягкой, топологически активной структуре с хорошо спроектированной кривизной и импульсной волнодинамикой, проходящей через неё.
Ключевые принципы
1. Движение, управляемое кривизной
Основная идея: внутренняя или поверхностная волна (акустическая, тепловая, механическая, плазменная) распространяется по телу микромашины, а кривизна поверхности модифицирует траекторию и фазовое распределение этой волны таким образом, чтобы возникал результат в макроскопическом перемещении или деформации. Разные участки псевдоповерхности преобразуют одну и ту же волну в различные типы движения: изгиб, сжатие, вращение, поступательное движение. Нет необходимости в двигательных звеньях – импульс перераспределяется геометрией.
Пример:
Легкая волна (например, фононная модуляция) проходит по псевдоэллипсоидальной оболочке, вызывая асимметричное сдвигающее возбуждение в хвостовой части, а затем аналогично в передней. Возникает эффект “почвенного скольжения” – биомиметическое передвижение червя или бактерии.
2. Центральная роль формы
Исходное распределение кривизны задаёт алгоритм движений: от прямолинейного скольжения до орбитального вращения или сигмоидального изгиба. Вариации Гауссовой кривизны (K < 0, K = 0, K > 0) в пределах одного тела позволяют реактивно перераспределять волновую энергию во времени и пространстве. Изменение волнового входа (частота, амплитуда) – трансформация паттерна поведения, то есть структура "перестраивается" в другой тип движения без перестройки формы.
3. Локальное возбуждение – глобальное поведение
Локально возбуждаемая волна (например, лазером, электрическим импульсом, химически) распространяется по всей геометрии устройства. Волновое взаимодействие с различными участками в зависимости от их изогнутости вызывает каскад деформаций или микроперестроек. Эффект "самоанимации" – устройство начинает двигаться или выполнять заданную функцию «изнутри».
Волновой робот как искусственный микроорганизм
Эти структуры выполняют функции, подобные метаболизму и сенсорно-двигательной активности, без цифровой логики:
– Ориентация – за счёт смещения центра волнового фокуса временного возбуждения;
– Навигация – через нелокальную связь "где пришла волна" ↔ "куда сместилось тело";
– Ответ на среду – форма улавливает давление, температуру и искажает ответную волну.
Возможные реализации:
1. Флексомеханические оболочки
– Микрообъекты из мягких полимеров (гели, ПДМС, керамы) с запрограммированной асимметрией и встроенными резонансными траекториями.
– Управляются ультразвуком, светом, электрическим полем или температурой.
2. Графеновые или 2D-материалы с волновой активностью
– Использование колебаний на поверхностных плазмонах, поляритонах, фононах.
– Псевдолинейный фронт распространяется и вызывает движение за счёт формы решётки.
3. Метаповерхностные "волновые скаты"
– Структуры с изогнутыми спинальными траекториями, по которым движение возникает за счёт асимметричного распространения сигнала.
4. Модульные волновые ансамбли- Композит из нескольких кривоизогнутых тел, соединённых тонкими геофокусными мембранами.– Волна переходит от одной части к другой, создавая автономный цикл движения, как в выпускных рядах двигательных белков микроорганизмов.
Возможности и поведение:
– Микро- и нано-движение без встроенного источника энергии;
– Локально активируемые конструкции: движение возникает только там, где происходит возбуждение – возможно селективное поведение в среде;
– Адаптивность: изменение входного сигнала ведёт к изменению паттерна движения;
– Нелокальная обратная связь: воздействие на "ногу" приводит к реакции "головы" из-за распределённой кривизной связи.
Применения:
1. Биомедицина- Волново-активируемые микродоставщики в организме: направленная доставка наночастиц, лекарств, веществ без магнитного управления или химической тяги.– Устройства для локальной очистки сосудов, тканей, слизистых – активируются ультразвуком, без двигателей.
2. Нанофабрикация
– Волновые манипуляторы, которые выполняют базовые действия (перемещение, извлечение, реакция) внутри микросхем или сенсорных устройств.
– Автономные, геометрически управляемые технологические «щупальца».
3. Умные поверхности и адаптивные покрытия
– Ткани, изменяющие свою структуру или форму в ответ на облучение звуком или светом.
– Волновая логика, управляющая «волноподобной» текстурой в зависимости от среды.
4. Искусственные микроорганизмы
– Структуры, взаимодействующие со средой как бактерии: могут перемещаться к источнику сигнала, избегать опасности, связываться в колонии.
– Находят применение в контролируемом реагировании на био- или химические сигналы.
Преимущества:
– Энергоэффективны (волновой мотор без расхода топлива);– Миниатюризация ниже порога возможной миниатюризации механических приводов;– Устойчивость: нечувствительность к отказу микросхем, механоинерционным нагрузкам;– Баер-совместимость: могут использоваться внутри живых организмов, во влажных и агрессивных средах;– Простота масштабирования – можно создавать ансамбли из волновых микророботов.
Заключение
Волновые микромашины – это шаг к разумному, самоорганизующемуся материалу. Это синтез формы и действия, где движение – не команда, а рельеф. Это биомеханика без моторчиков, биоинженерия без ДНК, микророботика без электроники. Только волна и форма. Такие устройства уже не просто вдохновлены природой. Они ею становятся – в новой, инженерной, геометрически мыслящей форме.
Это рождение волновых существ – форм, которым достаточно волны, чтобы жить.
1.4 Управление инерцией: как псевдоповерхностные системы бросают вызов классической механике
Простая форма пространства может оказывать глубокое влияние на инерционные свойства тел. По сути, объекты, помещённые в особую геометрию, демонстрируют странные явления, которые раньше воспринимали лишь как сюжет фантастических романов.
Классическая механика утверждает, что масса тела определяет силу сопротивления изменению скорости – инерцию. Но оказалось, что эта связь не столь однозначна. Форма пространства, в котором находится объект, влияет на его инертные качества. Такое открытие меняет наши взгляды на устройство мира и открывает путь к технологиям, ранее считавшимся фантастическими.
Теоретические основы
Объяснить данное явление помогает понятие геометризации инерции. Когда пространство искривлено, уравнения движения меняются, приобретая дополнительные компоненты. Говоря простым языком, деформация пространства воздействует на тело, меняя его сопротивление внешнему воздействию.
Формула эффективной массы выглядит следующим образом:
m_{eff} = m_0(1 + β·K)
где:
β – коэффициент связи (~10⁻⁸ для лабораторных условий).
K – гауссова кривизна.
То есть в сильно искривленном пространстве обычная масса изменяется, становясь больше или меньше в зависимости от знака кривизны.
Это означает, что предметы в таком пространстве ведут себя словно имеют меньшую массу, легче реагируя на внешние силы. Такие эксперименты открыли путь к разработке принципиально новых устройств, одним из примеров которых могут служить спутники с нулевой инерцией.
Применение на практике
Рассмотрим конкретный пример: спутниковую навигацию. Обычно коррекция орбиты требует значительных затрат топлива и энергии. Новая технология позволяет уменьшить требуемый импульс для маневров и сэкономить ресурсы.
Таблица показывает сравнение обычного спутника и аппарата с псевдоповерхностной системой управления инерцией:

Получается, что такая технология способна продлить срок службы аппаратов, снизить энергозатраты и повысить эффективность всей миссии.
Ограничения и перспективы
Стоит отметить, что пока речь идет о небольших величинах эффектов, применимых преимущественно в микроэлектронике и устройствах малой мощности. Учёные предупреждают, что полное игнорирование инерции невозможно, ведь природа сохраняет баланс энергии и импульса. Если инерция уменьшается, значит, где-то другое свойство должно компенсировать это уменьшение.
Ещё одно ограничение связано с микроскопическими размерами, где начинают проявляться квантово-механические эффекты. Поэтому полноценная реализация проекта потребует дальнейших разработок теории, учитывающей квантовую природу пространства-времени.
Речь не идёт о нарушении базовых законов физики, а скорее о новом взгляде на давно известные принципы. Так профессор Элиас Вент, руководитель отдела перспективных двигателей Европейского космического агентства (ESA), отметил:
«Мы не создаем антигравитацию – мы открываем новые способы взаимодействия в рамках уже известных законов физики.»
2. Волновые коммуникации
2.1 Терагерцовые излучатели: прорыв в сканировании и связи
Одной из наиболее интригующих областей современной науки стало освоение терагерцового (ТГц) диапазона электромагнитных волн. Долгое время он оставался недостаточно изученным из-за технических сложностей, однако сейчас его важность стала очевидной.
ТГц диапазон важен, т.к. частоты излучения лежат между микроволнами и инфракрасным светом, что делает их идеальным выбором для множества практических применений. Главное достоинство этих волн состоит в том, что они свободно проникают сквозь большинство диэлектриков (таких как ткань, дерево, пластик, картон), но хорошо отражаются от проводников и жидкостей. Это качество позволяет применять ТГц-излучение там, где другие виды волн неэффективны или опасны.
Однако существовал важный недостаток: эффективное использование ТГц было затруднительно из-за низкой чувствительности и низкого коэффициента полезного действия приёмников и генераторов.
Решением этой проблемы может стать работа с псевдоповерхностями – специальными конструкциями, состоящими из периодических структур с отрицательной кривизной.
Особенности псевдоповерхностей
Псевдоповерхности представляют собой уникальные материалы, созданные с учётом особенностей распространения электромагнитных волн в данном диапазоне. Особенность их структуры позволяет эффективно управлять формированием и передачей ТГц-сигнала, концентрируя энергию в нужном месте и формируя предельно узкий пучок.
Это даёт сразу несколько важных преимуществ.
– Эффективность. Антенны и приёмники, построенные на псевдоповерхностях, отличаются повышенной мощностью сигнала и высоким КПД, что увеличивает дальность и чувствительность.
Компактность. Излучатели уменьшились с десятков сантиметров до единиц сантиметров, став удобными для мобильных и портативных устройств.
– Управляемость. Конструкция псевдоповерхностей позволяет целенаправленно изменять направление и интенсивность лучей, облегчая передачу данных и диагностику.
Ширина спектра ТГц охватывает сотни гигагерц, что намного превышает возможности нынешних стандартов мобильной связи. С появлением высокоэффективных псевдоповерхностей становится возможной передача данных со скоростью терабайт в секунду на расстояния до сотен километров.
Таблица сравнения.

Этих показателей достаточно, чтобы считать, что использование псевдоповерхностей способно совершить настоящий прорыв в развитии ТГц-технологий.
Комбинирование возможностей псевдоповерхностей и терагерцового диапазона открывает грандиозные перспективы для медицины, охраны правопорядка и телекоммуникаций.
Освоение этих технологий выведет технологию на качественно новый уровень понимания и использования электромагнитных волн, приближая будущее, где информация передается быстрее, диагностика проводится точнее, а безопасность становится абсолютной.