

Полная версия
All sciences. №5, 2023. International Scientific Journal
where: F0λ1 and F0λ2 are radiation fluxes after passing through the gas chamber at wavelengths and, respectively: c1 is the concentration of a mixture of gaseous substances; L is the length of the optical path, i.e. the length of the gas chamber; c2 is the concentration of the gaseous substance;
K1 is the scattering coefficient of a mixture of gaseous substances;
K2 is the absorption coefficient of the gaseous substance being determined.
The radiation flux varies in time (t) according to the exponential law:

where: A is a constant coefficient corresponding to the initial value of the exponential pulse amplitude, N is the number of pulses from the beginning of the exponent to the moment of change of the photoelectric signal.
At the moment of equality of the radiation fluxes and we obtain that
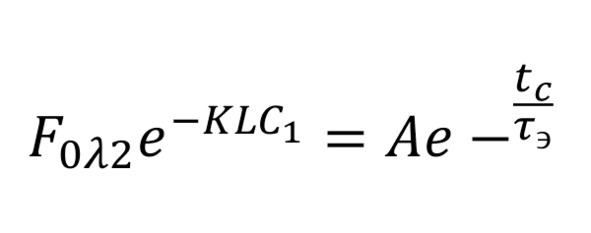
from which it follows that:
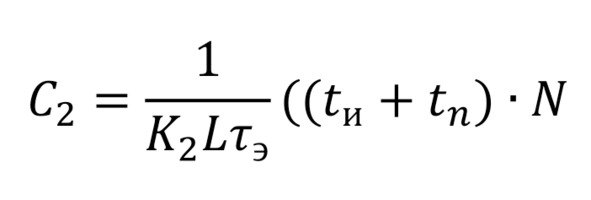
where: te is the exponential time constant.
In the alarm sensor for geothermal energy facilities, LEDs with radiation spectra of 3.2 microns (reference) and LEDs with radiation spectra of 3.4 microns (working) are used.
Figure 1 shows a block diagram of an alarm sensor for geothermal energy facilities, which consist of a power supply unit – 1, a generator – 2, a frequency divider – 3, a single—vibrator – 4, an exponential function modulator – 5, an emitter repeater – 6, electronic keys 7 and 8, light-emitting diodes (9 and 10), gas chamber – 11, photodiode – 12, first differentiating device – 13, threshold device – 14, matching circuit – 15, second differentiating device – 16, counter – 17.
The alarm sensor for geothermal energy facilities works as follows:
The rectangular pulse generator – 2 generates pulses with the required repetition rate. These pulses from the antiphase outputs go to the input of the divider – 3 frequencies and to the control inputs of the keys – 7 and 8. Rectangular pulses from the output of the divider – 3 frequencies go to the input of the single – vibrator – 4. Rectangular pulses with the required duration from the output of the single – vibrator – 4 enter the input of the exponent modulator – 5, the output of which is connected via an emitter repeater – 6 to the input of the electronic key – 8, where a discrete exponential current pulse is formed, which flows through the emitting diode 9, causing a radiation flux according to the same law. The electronic key – 7 switches to the pulses that fill the exponent in an antiphase manner.
Figure 3 shows the transfer function of the alarm sensor for geothermal energy facilities.
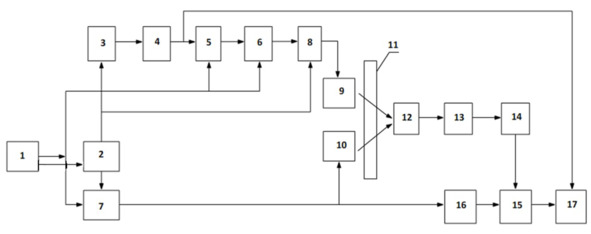
A current pulse flowing through a light-emitting diode 10 causes a luminous flux, the amplitude of which is constant. The radiation streams of LEDs that have passed through the gas chamber – 11 are received by the photodiode – 12. This signal is fed to the input of the first differentiating device – 13, from the output of which the differentiated photoelectric signal enters the input of the threshold device – 14.
Next, the signal from the output of the threshold device – 14 is fed to one of the inputs of the matching circuit – 15. A signal is sent to the other input of the coincidence circuit – 15 from the output of the second differentiating device – 16. From the moment of comparison, a number of pulses appear at the output of the coincidence circuit – 15, which arrive at the counting input of the counter – 17. At the beginning of the next exponent, the counter – 17 receives rectangular pulses from the output of the single—vibrator – 4 at the input "Zero setting" and the counter – 17 is prepared for the next cycle.
Comparison of the amplitudes of the reference and measuring radiation fluxes using a threshold device ensures the accuracy of measurement of a geothermal gas monitoring device based on semiconductor emitters.
Literature
1. Akhmedov G. Ya. Protection of geothermal systems from carbonate deposits. M.: Scientific World, 2012.
2. Kiseleva S. V., Kolomiets Y. G., and O. S. Popel’, «Assessment of solar energy resources in Central Asia,» Appl. Sol. Energy (English Transl. Solar Engineering), 2015, doi: 10.3103/S0003701X15030056.
PHOTOVOLTAIC EFFECT IN a-QUARTZ
UDC 548.1.024.5
Karimov Boxodir Xoshimovich
Candidate of Physical and Mathematical Sciences, Associate Professor of the Department of "Technological Education" of the Faculty of Physics and Technology of Fergana State University
Ferghana State University, Ferghana, Uzbekistan
Annotation. The anomalous photovoltaic effect observed earlier for LibO 3:Fes ferroelectrics is a special case of a more general FE existing in crystals without a center of symmetry and described by the third ai j k tensors.
Keywords: photovoltaic effect, ferroelectrics, tensor, tensor components.
Аннотация. Аномальный фотовольтаический эффект, наблюдавшийся ранее для сегнетоэлектриков Li bO3:Fe SbSJ, является частным случаем более общего ФЭ существующего в кристаллах без центра симметрии и описываемого тензорам третьего ai j k.
Ключевые слова: фотовольтаический эффект, сегнетоэлектрики, тензор, компоненты тензора.
The components of the aij tensor are nonzero for 20 acentric point symmetry groups. With uniform illumination by linearly polarized light of a homogeneous piezo crystal and ferroelectrics, a photovoltaic current arises in it. The sign and magnitude of the photovoltaic current depends on the orientation of the polarization vector of light with its components and Ul*, the direction of its propagation and the symmetry of the crystal.
In accordance with (I) and the symmetry of the point group, it is possible to write an expression for the photovoltaic current. Comparison of the experimental criminal dependence with (β) makes it possible to determine the photovoltaic tensor aajk or photovoltaic coefficients
(a* is the light absorption coefficient).
If the electrodes of the crystal are opened, the photovoltaic current generates a photovoltaic voltage of 103-105 B. the value of which can be several orders of magnitude greater than the band gap of piezo or ferroelectrics. There is no FE in centrosymmetric crystals.
We studied a-quartz, one of the more common crystalline forms of silica (SiO2). At tempratures up to 573o, there is a so-called "low-temperature" a-quartz. A-quartz crystals belong to the trigonal trapezohedral class of the trigonal system (point group of symmetry 32) and are often found in two known forms: right and left crystals. At normal pressure and temperature of 573o With a – quartz turns into a hexagonal—trapezohedral class of the hexagonal system (point symmetry group 622).
The third—order axis in quartz is the optical axis of the crystal. One of the axes of the second order is the electric axis and the normal to both of these axes is the mechanical axis.
The symmetry of the quartz structure determines the symmetry of the properties of this crystal.
Quartz has the need to rotate the plane of the field, not only along the optical axis, but also in a direction perpendicular to it. It has been experimentally established that the ratio remains constant for wavelengths from 545 to 565 Nm and is equal to 054, i.e. the rotation of the plane in the directions perpendicular to the optical wasp is immeasurably two times less than that of the optical wasp. Despite all the "popularity" of quartz, both its properties have not yet been studied in detail.
In this paper, the results are presented, the effect of the polarization of light on
Af effect in natural crystal -quartz with natural coloring.
Figure 1 shows the angular instability of the photovoltaic current in a native a-quartz crystal with a natural color. The crystals were suspended in the impurity spectral region (l- 300—500 nm, a2 = 2cm -1) at room temperature. Figure 1 shows two orientational angular dependence Jx (b) when illuminated in the direction of the a-z axis, while for a-quartz K11 = (1—3). 10—13 A. cm (W) -1.
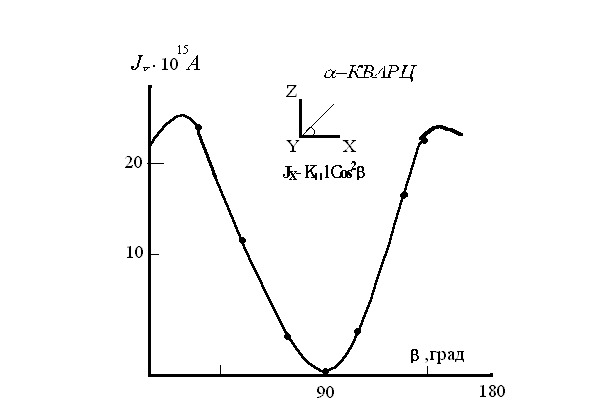
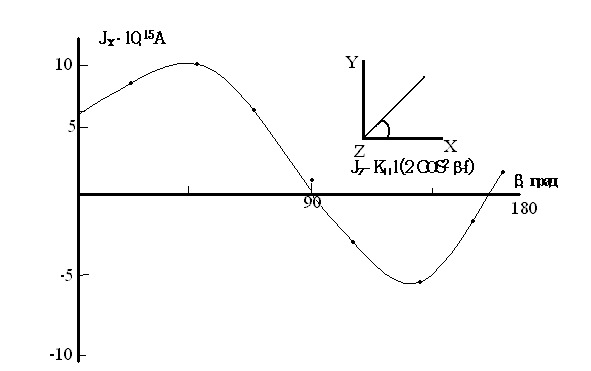
The illumination in the Z—direction reveals a noticeable deviation of Jx(b) from the theory. Perhaps this is due to the difference in the values of the optical activity coefficient of quartz for the Z— and Y—directions. Attention is drawn to the very low value of the photovoltaic coefficient K11 in a-quartz. It characterizes the impurity centers responsible for the natural coloring of natural crystals and does not reflect the asymmetry of their own transitions. Unfortunately, a-quartz impurity centers have not been specifically investigated; this provides an independent task.
The field was measured by the compensation method
the corresponding photo voltage V=El generated in quartz in the x-axis direction. At room temperature, the following values were obtained:
Due to the temperature dependence of the conductivity of quartz, the field and the photon voltage M increase with decreasing temperature.
Literature
1. Ryvkin S. M. Photoelectric phenomena in semiconductors Fizmatgiz.1963,494p
.2. Fridkin V. M. Ferroelectrics-semiconductors. M., Nauka 1976.
ABOUT THE ABILITY TO MOVE ROBOTIC DEVICES AND THE USE OF NEW IDEOLOGUES-MATHEMATICAL ALGORITHMS IN THEIR CREATION
UDC 004.896
Karimov Boxodir Xoshimovich
Candidate of Physical and Mathematical Sciences, Associate Professor of the Department of "Technological Education" of the Faculty of Physics and Technology of Fergana State University
Qo’chqorov Ahliddin Mirzohidovich
Lecturer of "Technological Education" of the Faculty of Physics and Technology of Fergana State University
Ferghana State University, Ferghana, Uzbekistan
Annotation. The performance of a large number of various types of work and operations today is also reduced to the possibility of moving it and making movement. Of course, there are other types of robots that perform their functions in the same location, however, a large number of robots use different ways of movement, which is described in this paper.
Keywords: robot, movement, methods of movement, provision of various kinds of services, demonstration, electric energy.
Аннотация. Выполнение большого количества самой различного типа работ и операций в сегодняшний день сводиться также и к возможности его перемещение и совершения движения. Разумеется, существуют прочие типы роботов, исполняющие свои функции и в одном местоположении, однако, большое количество роботов используют именно различные способы передвижения, что описано в настоящей работе.
Ключевые слова: робот, движение, способы передвижения, оказание различного рода услуг, демонстрация, электрическая энергия.
The very concept of "robot" was created quite early, back in 1920, by the Czech writer Karel Chapek and his brother Josef for Mr. Chapek's science fiction play "R. U. R.", which was staged in 1921, after which it enjoyed success and then became popular. The same terms as "robotics" or more precisely "robotics" were more popularized by the famous writer Isaac Asimov in the science fiction story "Liar" of 1941.
To date, there are a huge number of very different robots, however, the problem of performing human-like movement among most of them on two or more limbs remains and therefore wheeled or tracked robots remain the most common among them, while four-wheeled ones are most often used, but of course there are robots that use more of them, or less, in favor of simplifying the design. A striking example of this is two-wheeled robots using gyroscopic systems for their precise retention and maintaining balance, using the dynamics of an inverse pendulum.
A more popular example of such a device is the segway, which, for comparison, was used as a transport platform in the Robonaut robot developed by NASA. It may seem surprising, but there are also unicycle-like robots that hold the alignment, but they are extremely rare. More actively, ballbots are used instead of them, which are already used, as can be seen from the name of the sphere, driven by several electric motor systems with general control of their retention and balance. Another interesting solution may be such a sharobot, the control system and other details, together with the brain system of which is not taken outside the robot body itself, but is located exactly inside it. Robots developed by the Swiss Higher Technical School, Tohoku Gakuin University and others have become popular.
There are, of course, types that use a larger number of wheels or a tracked type of movement, while such robots have the ability to move in a variety of surfaces, most often uneven, which allows the ability to move the wheel restraint systems along various axes. This design is also called "omnidirectional wheels".
When the technology of using wheels and tracks was described, it is also worth describing the way of movement on the limbs, or more precisely, walking robots, publications about which began in the 1970s and 1980s, although mentions of such devices and machines were still in the myths of Ancient Greece, where it was about the servants of the god Hephaestus, which he created and he gave reason, and popularization was already in subsequent science fiction novels by famous writers.
Of course, numerous motor gears operate at the same time, and no matter how surprising it is, such structures are easier to design, besides, they can use more limbs, as mentioned, or use only hands while walking, and hands and feet when running. However, the biggest problem among the creation of such robots is their poor retention and the ability to keep balance, like the human body.
And although research in this area is still ongoing, there are a huge number of different ways to solve these problems. An example of these technologies is the method of using a servo drive and a hydromechanical drive, ZMP technology and others. If walking itself is difficult for robots, using more complex movements for them may seem absurd, but surprisingly, there are only jumping robots that perfectly cope directly with this function. And of course, methods for adaptive algorithms for maintaining equilibrium are more progressive, of which there are not only a huge number, but during real testing, you may have to create completely new, previously non-existent algorithms.
Other, more exotic, but no less interesting methods for moving robots include flying robots, an example of which can be given at least UAVs (unmanned aerial vehicles), crawling robots that already imitate the way snakes, worms, slugs move, there are also robots moving on vertical surfaces, like geckos with a way of holding them on glass surface, or swim freely like fish, jellyfish and other inhabitants of marine flora and fauna.
As you can see, drawing conclusions, humanity, following the path of improving robotic devices, has already been able to find opportunities for imitation of such devices to a variety of living organisms, without excluding the person himself. But do not forget that this is just the beginning and there is even a lot to be done ahead, for example, to better adapt to full-fledged walking, find more favorable solutions, and further develop such technology even further, achieving even greater results.
Конец ознакомительного фрагмента.
Текст предоставлен ООО «ЛитРес».
Прочитайте эту книгу целиком, купив полную легальную версию на ЛитРес.
Безопасно оплатить книгу можно банковской картой Visa, MasterCard, Maestro, со счета мобильного телефона, с платежного терминала, в салоне МТС или Связной, через PayPal, WebMoney, Яндекс.Деньги, QIWI Кошелек, бонусными картами или другим удобным Вам способом.