Полная версия
Эксплуатация современных судовых дизельных установок
Необходимо обеспечить применение качественных масел рекомендуемой вязкости. При эксплуатации температуру масла не рекомендуется повышать более 60 С, давление масла в системе надо поддерживать в рекомендуемых пределах (обычно 0,13–0,30 МПа), для чего в гравитационной цистерне предусмотрены поплавковые ограничители уровней. Необходимо своевременно очищать фильтры и отстойники, контролировать качество масла.
Характер распределения нагрузки на работающие двигатели в одновальной двухмашинной пропульсивной установке иллюстрируется рисунком 2.3 [1].
Предполагается, что вращающий момент, поглощаемый винтом, равномерно распределяется между двумя ГД, работающими на один вал. Кривые изменения крутящих моментов при различных частотах коленчатого вала двигателей n1 изображены для случаев подключения одной (линии 1) и двух (линии 2) муфт. Кривая I представляет собой винтовую характеристику, приведенную к ведомому валу гидромуфты.
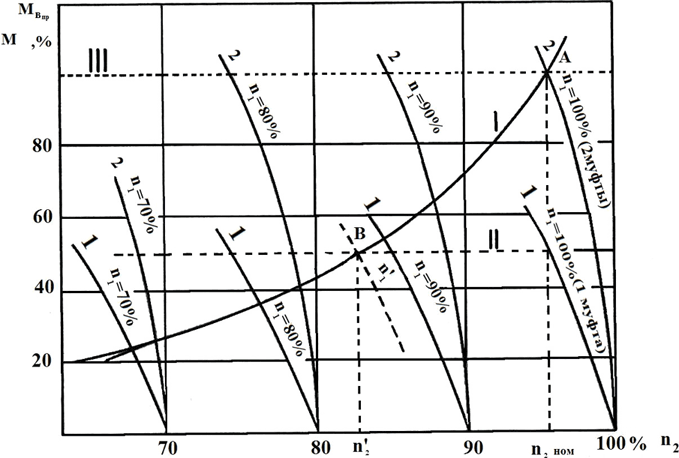
Рис. 2.3. Определение режимов совместной работы двигателей с ГВ в двухмашинной одновальной установке с гидромуфтами [1].
Линии I и II являются характеристиками по максимальному крутящему моменту при работе соответственно двух и одного ГД. По точкам пересечения кривых определяют частоту вращения ведомого вала гидромуфты и гребного винта по известной частоте вращения двигателя n1.
При работе двух двигателей на номинальном режиме рабочая точка режима, находится в точке А. Частота вращения ведомого вала гидромуфты равна n2ном Если работает один двигатель, то максимально допустимый момент будет достигаться в точке В, при частоте вращения ГД n1 и частоте вращения ведомого вала n2.
Частота вращения ведомого вала гидромуфты равна
n2 = n1 ∙ ηгм,
где n1 – частота вращения двигателя и ведущего вала;
ηгм – КПД гидромуфты.
Частота вращения гребного вала,
nв = n2 ∙ i,
где i – коэффициент редукции частоты вращения.
Имея совмещенный график, изображенный на рисунке 2.4 можно вычислить при какой частоте вращения гребного вала необходимо включать в работу два двигателя, а также оценить скорость судна при работе одного двигателя.
Управление двигателями в многовальных установках имеет свои особенности. Современные ГД, как правило, комплектуются регуляторами частоты вращения реализующими защиту по перегрузке и давлению наддува. Степень неравномерности для ГД, работающих в одновальных установках выставляется в пределах 1,5…3,0 %. В двухвальных установках она не может быть меньше 3 %, так как возможно возникновение обменных колебаний.
Повысить надежность и безопасность эксплуатации энергетических установок с двумя гребными винтами можно, если предусмотреть в системе управления обеспечение фазовой синхронизации гребных валов, которая приводит к значительному снижению вибрации на многовальных судах [5].
2.2.4. Режим работы ГД в установках с электрической передачей
Режим работы дизеля определяется при совместном рассмотрении винтовых характеристик потребителя, характеристик тягового электродвигателя и внешней характеристики дизеля.
На рис. 2.4 приведены характеристики пропульсивного комплекса буксира-спасателя. Кривые 1, 2, 3, 4 показывают механические характеристики тягового электродвигателя при различных частотах вращения дизеля. За ограничительный параметр принимают постоянство мощности электродвигателя. Если кривая изменения крутящего момента электродвигателя при постоянной его мощности (кривая III) проходит ниже механической характеристики, то на таких режимах возможна перегрузка ГД.
Гребные электрические установки постоянного тока применяют на судах с тяжелыми режимами работы (частое реверсирование, резкое изменение момента сопротивления ГВ вплоть до заклинивания, необходимость создания значительного момента на малых оборотах винта).
Реверсирование ГВ на полном ходу происходит очень быстро и имеется возможность работы на самом малом числе оборотов (4…5 % от номинального числа оборотов).
В настоящее время активно используются вынесенные электрические винторулевые комплексы типа Azipod. Принципиально эта новая система не отличается от традиционной передачи на винт. Управляемость и маневренность судов значительно улучшилась за счет повышения эффективности работы винта, который вынесен за пределы возмущенного корпусом судна потока воды.
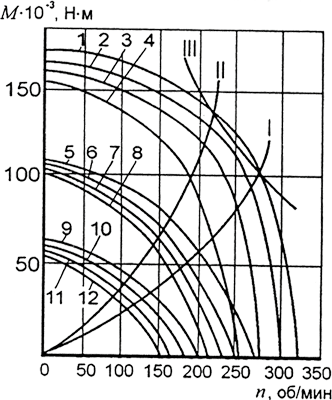
Рис. 2.4. Характеристики ПК буксира-спасателя на номинальном и частичных режимах работы [1]:
I, II – винтовые характеристики судна на свободном ходу и на швартовых;
III – характеристика при постоянной мощности электродвигателя. 1…12 – тяговые характеристики при различных частотах вращения ГД (1…4), при различных токах возбуждения (5…8), при комбинированном способе управления (9…12)
Система обеспечивает полный упор винта в любом направлении, освобождая судно от традиционной массивной линии вала и рулевого устройства.
Типовая схема главного ВРК Azipod с электродвигателем, размещенным в гондоле, и непосредственно вращающем ГВ представлена на рисунке 2.6 [27].
Конструктивно гребной электродвигатель колонки «Азипод» встроен в стальной корпус подводной части колонки. Гребной электродвигатель имеет воздушное охлаждение, причем воздух подается из румпельного помещения (при необходимости через холодильники). Передача крутящего момента от электродвигателя к гребному винту производится через гребной вал, установленный на опорно-упорных подшипниках качения и имеющий уплотнения. Электроэнергия на привод гребного электродвигателя подается от судовой системы электропитания.
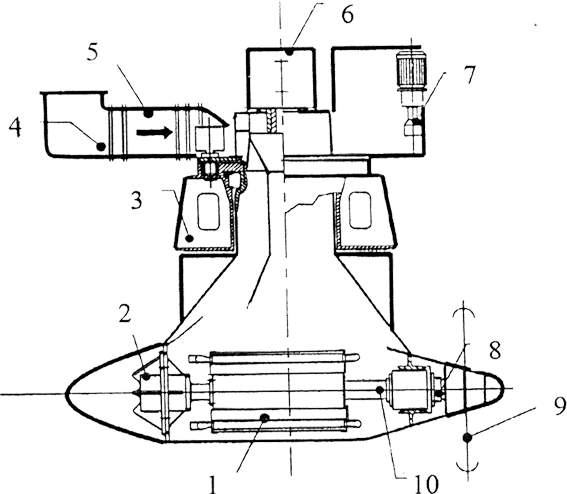
Рис. 2.5. Типовая схема ВРК с электродвигателем в гондоле [3]:
1 – электродвигатель; 2 – упорный подшипник; 3 – установочный блок; 4 – вентиляционная установка; 5 – воздухоохладитель; 6 – токосъемник; 7 – гидравлическая система поворота колонки; 8 – подшипник и уплотнения ГВ; 9 – винт фиксированного шага;
10 – гребной вал
Используются эластичные кабели, с ограничением угла разворота «Азипода», либо кольца скольжения (в этом случае колонка может вращаться вокруг вертикальной оси свободно без ограничений). Рулевая система «Азипода» гидравлическая.
В гондоле колонки располагается электродвигатель переменного тока, частота вращения которого регулируется частотным преобразователем.
Движительные комплексы «Азипод» могут выполняться в различных компоновках: в тянущем варианте, когда винт расположен впереди гондолы и толкающем – с расположением винта за гондолой, а также двухвинтовом варианте с винтами впереди и сзади гондолы при расположении винтов в насадке или без нее.
Важным положительным качеством ГВРК является хорошая управляемость судна на заднем ходу, благодаря большой поперечной силе, условиям обтекания корпуса, когда струя винта не натекает на него. Для обеспечения заднего хода ГВРК разворачивается на 180°, при этом гребной винт не реверсируется.
Рулевое устройство включает два или три гидравлических двигателя. Система контроля «Азипода» включает контроль всех электрических цепей на мостике вместе с главными электрическими панелями.
В отличие от ВРК с механическим приводом требуется обслуживание системы воздушного охлаждения. Воздух подается в рулевую колонку из румпельного помещения и может при необходимости предварительно охлаждаться в охладителях водой.
В качестве приводных двигателей применяются высокооборотные или среднеоборотные дизели, приспособленные для работы на средневязких топливах.
2.3. Установившиеся режимы совместной работы ГД с ВРШ
Область эксплуатационных режимов СДУ с ВРШ за счет изменения шагового отношения H/D существенно шире, чем в установках с ВФШ. Так, например, при n=0,6 можно получить увеличение мощности за счет разворота лопастей гребного винта с


Винт регулируемого шага позволяет подобрать такое шаговое отношение для данной частоты вращения, при котором удельный расход топлива будет минимальным, а КПД винта – максимальным, что невозможно достигнуть при ВФШ. Зона используемых мощностей при установке ВРШ значительно больше.
ВРШ сложнее и дороже, чем ВФШ, но имеет ряд существенных преимуществ:
1. Имеется возможность более полно использовать мощность ГД в любых условиях плавания;
2. Улучшается маневренные качества судна, так как можно обеспечить любые малые скорости движения судна и его остановку при номинальной частоте вращения коленчатого вала ГД;
3. Повышается ресурс ГД, который во многом зависит от числа и продолжительности пусков;
4. Обеспечивается реверс при неизменном направлении вращения коленчатого вала ГД. При реверсировании нет необходимости преодолевать положительный вращающий момент гребного винта на ходу судна, как это имеет место в установках с ВФШ, где винт будет работать в режиме гидротурбины и при подаче контрвоздуха в цилиндры будут возникать дополнительные механические напряжения в валопроводе и ГД;
5. Можно применять более дешевые и надежные нереверсивные двигатели. Однако следует отметить, что ВРШ применяются в основном в установках с реверсивными СОД и редукторной передачей. При заклинивании лопастей и отказе ВРШ можно использовать его как ВФШ. Предусматриваются различные способы разворота и фиксации лопастей в определенном положении на передний ход (при помощи отжимных болтов или встроенных в ступицу пружин, которые при падении давления масла выводят поршень МИШ в положение переднего хода);
6. Обеспечивается эффективное управление ВРШ с мостика;
7. Можно начать движение судна с места при номинальных мощностях и частоте вращения коленчатого вала двигателя, а, следовательно, с максимальной тягой винтов без какой-либо перегрузки главных двигателей. Повышение скорости судна будет плавным и значительно быстрее, чем у судна с ВФШ. Это важно для судов, к которым предъявляются повышенные требования в отношении маневрирования (буксиры, ледоколы, паромы);
8. Обеспечивается простота реализации схемы с отбором мощности на привод валогенератора за счет возможности работы двигателя в режиме n=const.
2.4. Неустановившиеся режимы работы СДЭУ
2.4.1. Пуск ГД и ввод в режим эксплуатационной нагрузки
Пуск дизеля и вывод его на эксплуатационную нагрузку является одним из наиболее ответственных и напряженных режимов работы СДУ. Последовательность действий при подготовке к пуску и пуске ГД изложены в заводских инструкциях по эксплуатации двигателей и в нормативных Правилах технической эксплуатации.
В дизельных установках без ВРШ и разобщительных муфт при пуске ГД помимо затрат энергии на интенсивное раскручивание коленчатого вала двигателя, для создания в цилиндрах при сжатии давлений и температур достаточных для надежного самовоспламенения топлива, необходимо преодолеть силу инерции массы судна, момента инерции движущихся частей двигателя и сопротивление движению судна.
При страгивании в начальный момент пуска двигатель в установках с ВФШ работает за пределами швартовной характеристики даже при наличии в регуляторе устройства защиты от перегрузок (комбинированный способ управления) будет перегружаться по крутящему моменту.
Для обеспечения надежного пуска необходима качественная топливоподготовка, установка оптимального угла опережения впрыска, подогрев охлаждающей воды и смазочного масла для прогревания дизеля, хорошее состояние топливной аппаратуры, обязательная прокачка маслом с предварительным проворачиванием вала дизеля и контролем чистоты цилиндров, соответствующее давление пускового воздуха и воздуха системы управления, надлежащее техническое состояние компрессоров, поршневых колец, пуско-реверсивной системы.
На рис. 2.6 изображена схема изменения величины крутящего момента двигателя в зависимости от частоты вращения двигателя при установке заданной первоначальной пусковой частоты вращения [6].
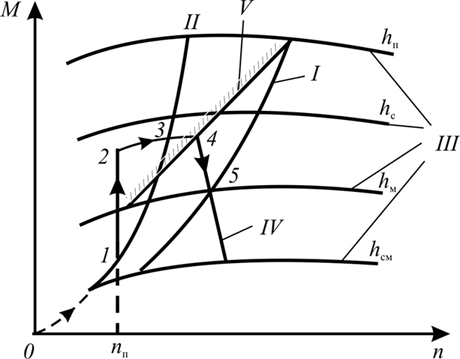
Рис. 2.6. Пуск двигателя при комбинированном способе управления:
I – винтовая характеристика; II – швартовная характеристика; III – внешние характеристики двигателя (постоянная топливоподача); IV – заданная регуляторная характеристика; V – ограничительная характеристика
Участок 0–1 соответствует раскручиванию двигателя пусковым воздухом. При достижении пусковой частоты вращения в точке 1 отключается пусковой воздух и включается пусковая топливоподача, соответствующая пусковому заданию частоты вращения IV на всережимном регуляторе частоты вращения и ограничительной характеристике V.
Участок 1–2 соответствует резкому увеличению топливоподачи до ее пускового значения. Подвижный упор устройства защиты от перегрузки ограничивает ход сервомотора точкой 2. Если бы не было устройства защиты топливоподача увеличивалась бы до точки пересечения продолжения линии I-2 и регулировочной характеристики IV или до упора топливной рейки.
Участок 2–3 соответствует разгону двигателя по внешней частичной характеристике до выхода на швартовную характеристику II в точке 3. Участок 3–4 соответствует разгону судна. Далее в точке 4 управление топливоподачей переходит к регулятору, который снижает ее до выхода двигателя на установившийся режим в точке 5.
После пуска дизеля необходимо проверить показания всех контрольно-измерительных приборов, обратив особое внимание на давление смазочного масла, охлаждающих сред, топлива. Убедиться в отсутствии ненормальных шумов, стуков и вибрации. Проверить работу лубрикаторов смазки цилиндров [8].
Для осуществления пуска дизеля необходимо достигнуть определенной частоты вращения. При малой частоте вращения, вследствие снижения скорости движения плунжера и увеличения протечек топлива в насосных секциях ТНВД, давление нагнетания топлива резко снижается и качество распыливания его форсунками ухудшается. В двигателях с сервоприводом ТНВД и с аккумуляторными системами впрыска снижение давления впрыска не происходит.
Предусматривается три попытки пуска, различные программы и пуск с разных постов управления.
В некоторых двигателях предусмотрено отключение нескольких цилиндров для облегчения пуска за счет увеличения цикловой подачи топлива. Фирма Mitsui осуществила это на некоторых двигателях К90МС. Давление впрыска топлива в оставшихся в работе цилиндрах увеличилось. Стабильная работа ГД достигалась при 13 об/мин (тогда как номинальные обороты составляют 104 об/мин) [29]!
Ввод в режим эксплуатационной нагрузки и маневрирование.
Главный дизель после пуска или окончания маневров необходимо вводить в режим эксплуатационной нагрузки в течение времени, указанного в заводской инструкции по эксплуатации либо установленного судовладельцем. Запрещается сокращать время ввода дизеля в режим, за исключением случаев, связанных с угрозой человеческой жизни или безопасности судна.
Прогрев должен быть постепенным, чтобы не допускать перегрева и значительного изменения зазоров в сопрягаемых деталях двигателя и возникновения трещин. Более подробно вопросы ввода в эксплуатационный режим рассмотрены в [9].
Маневрирование – это изменение направления движения и скорости с помощью руля, движителя, подруливающих устройств. При маневрировании происходит временное утяжеление винтовой характеристики.
При наборе скорости разгон судна теоретически идет по винтовой характеристике, которая, как правило, располагается ниже ограничительной характеристики, как, например, у МОД и СОД двигателей MAN Diesel & Turbo (рис. 3.7, 3.11), двигателей Wärtsilä RT-flex 48T-D (рис. 3.9). Но иногда и совпадает с ограничительной характеристикой (Wärtsilä W38B, см. рис. 3.12).
Однако в установках с ВРШ винтовая характеристика часто совпадает с ограничительной характеристикой (Wärtsilä L32), почти совпадает (MAN L23/30, см. рис. 3.17) или даже находится выше ее, как, например, у двигателей MAK (рис. 3.21). Тогда рекомендованная область комбинаторных характеристик находится существенно ниже.
Колебания нагрузки при маневрировании, а значит и уровня теплонапряженности зависят от возможностей регулятора частоты вращения. Если регулятор реализует ограничения по теплонапряженности и давлению наддува (UG-40TL, PGA, электронные), то больших бросков топливоподачи при наборе мощности не будет (см. рис. 2.6). Если же такие функции не поддерживаются (регулятор UG-40), то нагрузки будут больше, а чрезмерное задание по частоте (R3) может привести к кратковременному максимальному положению рейки (выход на упор, на характеристику самого полного).
Допустим была уставка (задание) регулятора (R1), соответствующая малому ходу М вперед. Устанавливаем задание (уставку) среднего хода R2 или R3. Регулятор UG-40 отработает рассогласование частот вращения. Больше рассогласование, больше подача топлива. Продолжительность подачи в зависимости от нагрузки. А интенсивность подачи топлива зависит от настройки изодромной связи. Изодром может подать топливо быстро или растянуто.
Количества подаваемого топлива будут соответстветствовать подачам данных частичных характеристик, проходящих через точки пересечения винтовой характеристики I и новых заданных регуляторных R2 (или R3), а не уровню максимальной подачи (упор рейки).
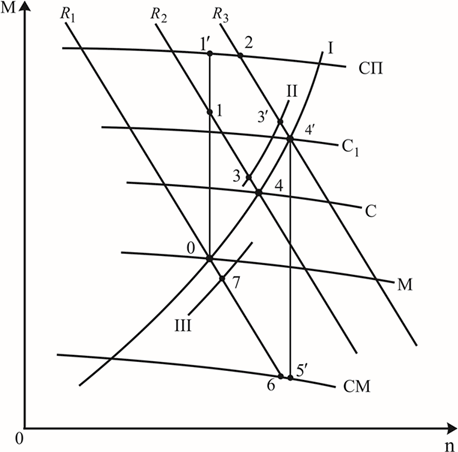
Рис. 2.7. Маневровая операция при управлении регулятором типа UG-40: I, II, III – винтовые характеристики; R1, R2, R3 – регуляторные характеристики; СМ – Самый малый ход; М – Малый ход; С – Средний ход; СП – Самый полный ход.
Но в начале обороты еще не выросли до уровня заданной частичной характеристики. Весь прирост энергии полученной за счет сгорания увеличения подачи топлива пойдет на приращение момента, так как должен выдерживаться баланс энергии, поэтому и линия 01 идет выше линии С (или С1). Величина прироста энергии будет, конечно, зависеть и от эффективности использования впрыснутого топлива. На эффективность сгорания влияет эпюра впрыска.
Может произойти пересечение линии 01 сначала с регуляторной характеристикой в точке 1 с последующим разгоном по регуляторной характеристике R2 до точки 3, а возможен и выход на предельное ограничение подачи топлива в точку 1 штрих (упор рейки), если задание по оборотам было большим (характеристика R3). Тогда дизель разгоняется по характеристике максимальной подачи до частоты, которой соответствует точка 2, и далее по регуляторной характеристике R3 до режима 3 штрих.
С точек 3 или 3 штрих начинается разгон судна, инерция которого значительно больше инерции ГД и валопровода. Двигателем этот режим будет восприниматься как винтовой утяжеленный II. Положение этой линии будет зависеть от момента инерции ГД, валопровода, задания оборотов, изменения механических потерь в ГД и передаче.
Разгон судна будет более медленным и закончится в точке пересечения с винтовой характеристикой I в точке 4 (или 4 штрих).
Исходя из вышеизложенного однозначная рекомендация следующая: нагружать двигатель надо поэтапно, по возможности медленно. Однако, при управлении ГД штурманом с мостика эта рекомендация может не выполняться.
Аналогично происходит переходный процесс при изменениии режима с С1 на малый ход (М) в последовательности 4 штрих – 5 штрих – 6–7–0.
При использовании регуляторов, реализующих ограничения по теплонапряженности и наддуву (UG-40TL, PGA, большинство электронных) ограничительная характеристика, которая будет всегда располагаться ниже линии упора, будет снижать нарастание подачи топлива (см. рис. 2.7)
2.4.2. Страгивание судна с места и его разгон
На режиме страгивания судна с места ГД может быть перегружен по крутящему моменту.
Изменение нагрузки на ГД в период разгона судна показано на рис. 2.8 [1].
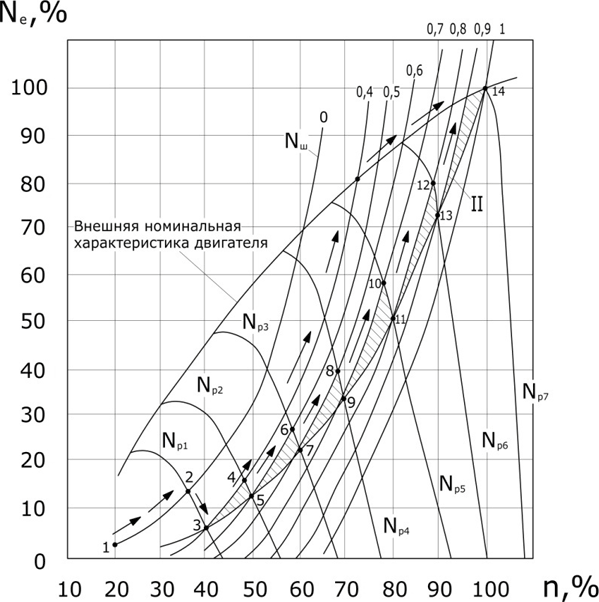
Рис. 2.8. Изменение нагрузки на двигатель в период разгона судна [1].
Разгон осуществляется ступенчато. Рукоятка управления регулятором последовательно с выдержкой по времени фиксируется в нескольких промежуточных положениях. На каждом промежуточной регуляторной характеристике делается выдержка во времени, необходимая для стабилизации теплового состояния двигателя. При достаточном количестве ступеней разгона судна удается затрачивать меньшую работу двигателя и исключается вероятность его перегрузки.
При экстренном разгоне судна рукоятка управления после запуска двигателя сразу переводится из положения Np1 в положение, соответствующее номинальной частоте вращения коленчатого вала. Рейка топливных насосов высокого давления передвигается регулятором в положение, соответствующее максимальной подаче топлива. Изменение эффективной мощности и частоты вращения коленчатого вала в период разгона происходит по более крутой винтовой характеристике (на рис. 2.8 – по характеристике, соответствующей относительной скорости судна

Двигатель выходит на внешнюю номинальную характеристику. При дальнейшем разгоне судна нагрузка на двигатель будет изменяться по внешней номинальной скоростной характеристике. Двигатель неизбежно перегружается
Точка 14 характеризует нагрузку на двигатель по окончании разгона судна. Таким образом, в штатных условиях медленный разгон осуществляется ступенчато приблизительно по винтовой теоретической характеристике.
В установках с ВРШ обеспечивается более быстрое протекание процесса разгона судна благодаря возможности полного использования эффективной мощности двигателей и получению более высоких тяговых характеристик судна
2.4.3. Реверсирование главного двигателя
Неустановившиеся процессы реверсирования и его фазы рассмотрены в известной литературе [1,9,30], поэтому ограничимся лишь рассмотрением некоторых моментов важных для обеспечения безопасной эксплуатации.
При торможении контрвоздухом (или при включения муфты реверса) резко возрастает нагрузка на ГД. Во избежание механических перегрузок контрвоздух следует подавать, когда частота вращения снизится до 30…40 % от номинального значения. Подача контрвоздуха при более высокой частоте малоэффективна из-за ограниченного поступления воздуха вследствие запаздывания момента открытия пусковых клапанов и недостаточности их время-сечения.
Реверсирование контрвоздухом может перевести судно на работу по более тяжелой винтовой характеристике нежели швартовная характеристика. Судно по инерции продолжает двигаться вперед, а ГД раскручивает винт на задний ход. Во избежание перегрузки двигателя по моменту следует снижать частоту вращения. А при работе на швартовых следует ограничивать частоту вращения во избежание перегрузки кормового конца коленчатого вала.
Реверсирование ГД, соединенного с ГВ через реверсивную муфту или реверсивный редуктор, осуществляется при снижении частоты вращения вала до 50…70 % от номинальной.
Гидродинамические передачи улучшают реверсивные свойства СДУ и сокращают время реверсирования. Время освобождения и наполнения рабочей жидкостью полостей гидромуфт составляет 5…15 с. Заполнение полости заднего хода начинается до полного опорожнения полости переднего хода. Длительность торможения ГВ составляет 10…30 с. Время реверсирования сокращается на 40…45 % [2].
В агрегатированных многомашинных редукторных установках с гидродинамическими и разобщительными фрикционными муфтами при частых переменах хода один двигатель может работать в одном направлении, а другой – в другом. Заполнение (включение) той или иной муфты быстро изменяет направление вращения гребного вала. При этом отпадает необходимость осуществлять запуски двигателей в процессе маневрирования и реверсирования судна.